今天,分享一篇智能粘附为何“超级粘”?南洋理工大学团队揭示形状记忆聚合物智能粘附来源,为智能粘附结构和应用提供指导思路,希望以下智能粘附为何“超级粘”?南洋理工大学团队揭示形状记忆聚合物智能粘附来源,为智能粘附结构和应用提供指导思路的内容对您有用。
来源:DeepTech深科技
智能粘附在自然界中随处可见,例如壁虎在天花板跑来跑去,蜗牛在树干爬行;在科幻电影中,我们也时常能看到智能粘附的应用,比如变异的蜘蛛侠依靠手上的粘性结构,轻松实现“飞檐走壁”。
实际上,智能粘附与我们的生活也息息相关。在生活中,人们可按需随时进行智能粘附,比如在需要时把挂钩牢牢地粘在墙壁上,而不需要时,就能轻松地取下来。
在生产中,智能粘附的作用更为广泛,它既可用于辅助 3D 打印结构进行快速分离、提高打印速度,还能用于太空垃圾的回收、深海样品(甚至是活的生物)的抓取,甚至是微纳电子器件的快速、大规模组装等。
实际上,人们已研发出壁虎仿生粘附,并将其应用在了不干胶、眼镜防滑贴、软抓手和爬墙机器人等领域。然而,这些基于壁虎仿生结构设计的智能粘附的粘附力仍受到很大的限制。
 (来源:Pixabay)
(来源:Pixabay)近日,相关论文以《形状锁定主导形状记忆聚合物“玻-橡转变”超强粘附的力学机理》(Mechanics of shape-locking-governed R2G adhesion with shape memory polymers)为题发表在固体力学旗舰期刊Journal of the Mechanics and Physics of Solids上[1]。
南洋理工大学固体力学专业博士生令狐昌鸿为论文第一作者,南洋理工大学机械与宇航学系博士后李栋、高华健院士、夏焜教授(K.Jimmy Hsia)为论文通讯作者。

增强粘附的关键在于形状记忆聚合物材料的形状锁定效应
研究人员对比了弹性基底和形状记忆聚合物基底与小球之间的粘附行为,通过有限元仿真、理论分析和实验验证,对形状记忆聚合物粘附材料在由软变硬过程中的粘附力增强的内部机理进行了深入研究。
结果发现,尽管形状记忆聚合物在由软到硬的转变过程中,模量变化了将近 1000 多倍,但是模量增加带来的粘附力贡献,只占了总粘附力增加的不到 2%。“从我们的结果来看,导致粘附力增加的大部分贡献源于形状记忆聚合物的形状锁定效应,这和以往的认识完全不同。”令狐昌鸿说。
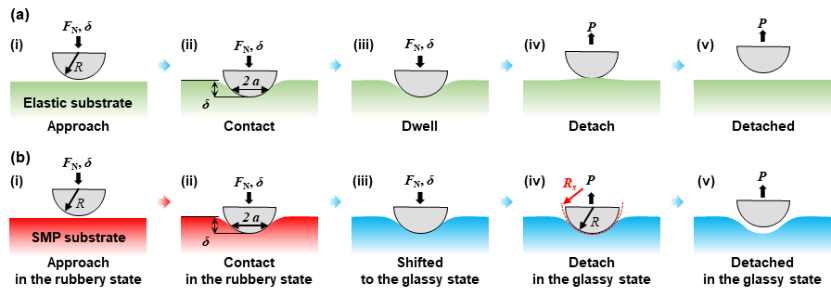
图丨小球-弹性基底与小球-形状记忆聚合物基底由软到硬转变粘附的基础力学模型对比示意图(来源:Journal of the Mechanics and Physics of Solids)
原来,“形状锁定效应”冻结了形状记忆聚合物和小球在接触过程中产生的变形,导致分离过程中,接触面上所有的地方都在拉小球;而不像传统弹性粘附系统中,小球底部大部分弹性基底都被压缩变形。他进一步指出,变形产生的反作用力都在推着小球分离,粘附作用都被变形的反作用力抵消。
只有当小球快被推开时,只剩下很小的接触区域会对小球表现出粘附力,故而粘附力并不会因为小球压入深度的增加而产生过多变化。因此,形状锁定效应才是粘附力增强的根源。
由于接触被“冻结”表现出拉力,研究人员观察到,小球被压入深度越大,接触面面积越大,粘附力也越大。所以,形状记忆聚合物才表现出粘附力的压入深度相关性,这种相关性在弹性粘附系统中并不存在。

图丨形状记忆聚合物粘附力增强的来源分析(来源:Journal of the Mechanics and Physics of Solids)

为形状记忆聚合物智能粘附结构和应用提供指导思路
有意思的是,在形状锁定后,小球和形状记忆聚合物基底的紧密贴合形状被“冻结”,此时其等效接触曲率半径Reff非常大,这和一个平底的圆柱和一个弹性的基底接触的情况很相似。
该团队进一步对比了小球-形状记忆聚合物基础粘附力学模型和平底圆柱-弹性基底基础粘附力学模型,发现二者表现出高度相似。也就是说,可以用后者的理论来作为前者的近似解,以指导超强形状记忆聚合物智能粘附结构的设计和应用。
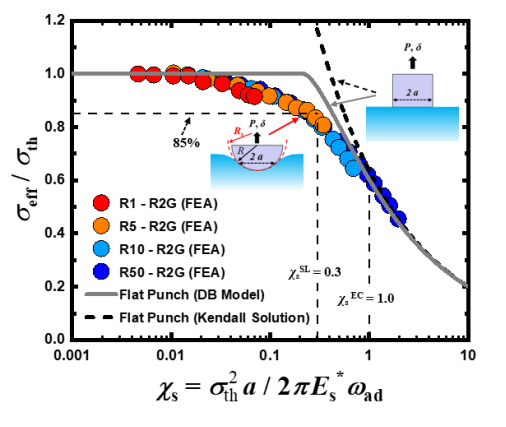
图丨小球-形状记忆聚合物基底和平底圆柱-弹性基底粘附系统的对比(来源:Journal of the Mechanics and Physics of Solids)
令狐昌鸿本科及硕士毕业于浙江大学的工程力学和固体力学专业,现为南洋理工大学固体力学专业博士生,导师为夏焜教授和高华健教授。
他的研究主要方向为智能界面粘附力学及其应用,主要基于界面力学、化学和物理原理,揭示不同环境下界面粘附强度强弱控制的机理,探索界面粘附强度调控的规律,并基于此研发自适应界面粘附系统,集成并应用于软体机器人、机械手、无人机、智能可穿戴柔性电子器件、医用胶带、超材料等领域。
 图丨令狐昌鸿(来源:令狐昌鸿)
图丨令狐昌鸿(来源:令狐昌鸿)据介绍,后续的工作将会基于该理论,将形状记忆聚合物智能粘附用于解决粘附佯谬问题,即粘附力按照理论推导在各种表面都应非常强,然而,由于表面粗糙度的存在,现实生活中大部分物体都不会粘附在一起。
“未来研究者可基于该理论,研发超强同时可以开关的粘附,将其应用到高负载的软抓手和软体机器人等领域,将会带来智能粘附设计和应用领域的变革。”令狐昌鸿说。
 参考资料:
参考资料:1.Changhong Linghu et al. Journal of the Mechanics and Physics of Solids 170, 105091(2023). https://doi.org/10.1016/j.jmps.2022.105091