今天,分享一篇拧瓶盖螺丝,高度灵活的柔性机器人为你开可口可乐,希望以下拧瓶盖螺丝,高度灵活的柔性机器人为你开可口可乐的内容对您有用。
不过,用机器人拧瓶盖总觉得有点「大材小用」。
在制造机器人的过程中,灵活、适当地组合各种性能是一项具有挑战的任务,因为这些性能有时是相互矛盾的。比方说,制造一个既灵活又强壮的机器人并非易事,但也不是不可能。
最近一项研究中,东京工业大学的研究人员制造出了这样一种机器人,它具有高度灵活性,同时仍保持其「肌肉」内的高度张力,使其躯体能进行充分的扭转,从而完成困难的任务。研究结果发表在 1 月 13 日的《IEEE 机器人和自动化通讯》。
论文地址:https://ieeexplore.ieee.org/document/10016717
在实验中,研究人员展示了该机器人能够从瓶子上取下盖子,过程中产生的扭转运动是同类机器人的 2.5 倍。此外,该机器人还能上螺丝。

上螺丝。
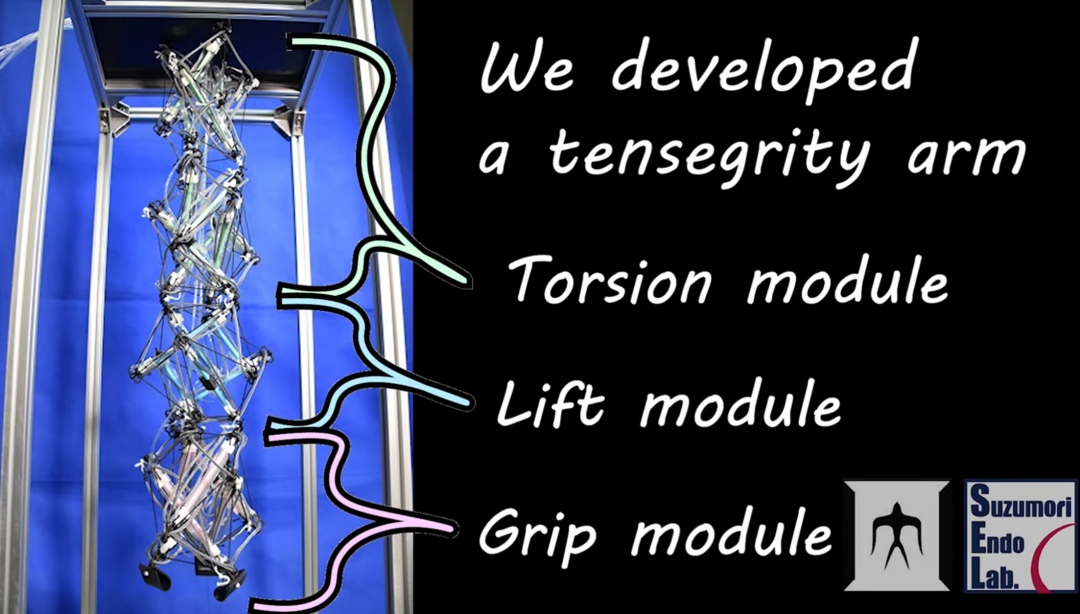
六杆张拉整体机器人概览
张拉整体机器人(Tensegrity robots)由刚性框架和软电缆组成的网络构成,这使它们能够通过调整内部张力来改变形状。
论文作者之一、东京工业大学硕士研究生 Ryota Kobayashi 说道,「张拉整体结构因其独特的特性而引人入胜 —— 轻巧、灵活和耐用。这些机器人可以在具有挑战性的未知环境中工作,例如洞穴或太空,能完成复杂的动作,并且工作得更有效率。」
张拉整体机器人可以有一个具有不同数量刚性结构(或杆)的基本结构,其中杆的数量从 2 个到 12 个不等,有时甚至更多。但通常而言,杆多的机器人通常更复杂,也更难设计。
在该研究中,Kobayashi 的团队创造了一个张拉整体机器人,它依赖六杆张拉整体模块(如下图所示)。为了确保机器人获得强大的扭转力,他们使用了一个虚拟的三角形图案,机器人的人造肌肉被放置在其中,使它们连接三角形的顶点。当肌肉收缩时,三角形的顶点会靠得更近。
 下图为不同角度的实际扭转运动。
下图为不同角度的实际扭转运动。
依靠这一技术,该机器人仅用 20% 的人造肌肉收缩,就在两个方向上实现了 50 度的大扭转运动。Kobayashi 感叹道,这个系统的效率令他们团队感到惊讶,人造肌肉的小收缩会促成大收缩和扭转变形。
东京工业大学助理教授 Hiroyuki Nabae 也参与了这项研究,他表示,由于结构的原因,大多数六杆张拉整体机器人只能轻微扭动,导致运动有限。但值得注意的是,该研究中的六杆机器人产生了大幅扭转运动,运动幅度是研究人员在文献中所能找到的任何其他六杆张拉整体机器人的 2.5 倍。
此外,为了锻炼机器人抓拿物体的能力,研究人员在机器人身上安装了橡胶指套,并测试了它完成任务的能力。正如上文动图所示,机器人手臂被下放到一个可口可乐瓶上,握紧瓶盖、扭转和抬起手臂,并重复握紧和扭转的动作,几秒钟内瓶盖就被打开了。

目前,研究人员正在考虑如何在这项技术的基础上进一步扩展,例如增加机器人向不同方向弯曲的能力,并结合允许机器人识别环境中其它形状的技术。这些将有助于机器人更好地适应新的环境,更出色地完成新任务。
参考内容:https://spectrum.ieee.org/tensegrity-robot