原标题:鳗鱼机器人登Science子刊封面,展示超强抗控制系统故障能力 来源:Science
智东西8月13日消息,能游泳的机器人又有新突破,瑞士洛桑联邦理工学院研究人员开发的鳗鱼机器人登上Science Robotics封面。
该鳗鱼机器人利用其各部分装有的传感器装置,能在中央控制系统损坏情况下,从水中获得传感反馈信号来协调其运动,为研究人员开发更简单、坚固的移动机器人开辟了一个新方向。
该研究论文题目为《基于局部水动力传感的鲁棒自组织波动游动的出现(Emergence of robust self-organized undulatory swimming based on local hydrodynamic force sensing)》,于8月11日发表在Science Robotics上。
01.原有游泳机器人依靠中央系统控制
机器人学和生物学之间关系密切,既有研究人员参考生物体设计机器人的情况,也有研究人员使用复制了生物体传感和控制系统的机器人,来帮助其了解生物体是如何完成一些运动的。
在设计、研究游泳机器人推进系统过程中,洛桑联邦理工学院研究人员对鳗鱼在水中感知周围流体的能力产生了兴趣,也就是鳗鱼在水中游动时身体感受到的压力状况。
一些鳗鱼类动物要完成波浪式起伏运动,需要靠其神经系统中的脊髓来控制,以及一组被称为神经振荡器(neural oscillators)的神经元来产生相应的有节奏的肌肉活动。除中央神经系统外,动物身体上还会有一些外周神经系统,由感觉神经元组成,向中枢神经提供身体和环境状态的信息。
因为在活体动物上进行实验较难,为此研究人员设计了一种名为AgnathaX的机器人。
该机器人是研究人员在一种名为AmphiBot的蛇形两栖机器人基础上,重新设计优化的。AmphiBot机器人也是洛桑联邦理工学院研究人员设计,能在水中游动。
AmphiBot机器人实现水下运动是靠中央模式生成器(central pattern generator,CPG)来实现。CPG是一种神经回路(一种生物体模式)序列,会产生像鳗鱼类动物运动时出现振荡节奏。
02.模块化设计实现机器人水动力感应
AgnathaX机器人是由驱动关节连接的刚体节段组成,每一刚体节段都带有独立的电路(包括振荡器和耦合器)、左右对抗肌和一对侧向力学传感器。
该机器人的核心由10个伺服电机组成,配有一台Linux计算机、一个电池和一个被动尾部模块。
研究人员组装AgnathaX机器人时,先将机器人核心部件放入防水泳衣中;然后将力学传感器模块通过磁铁从外部固定,这些模块通过电气连接(电力和通信)到相邻的模块,最后与机器人头部相连;最后在每个模块顶部安装一个带有嵌入式LED的、用于运动跟踪的浮动元件。
其中力学传感器模块由通信电路、带有相应放大器的测压元件和纤维板组成,可以实现机器人的水动力感应。
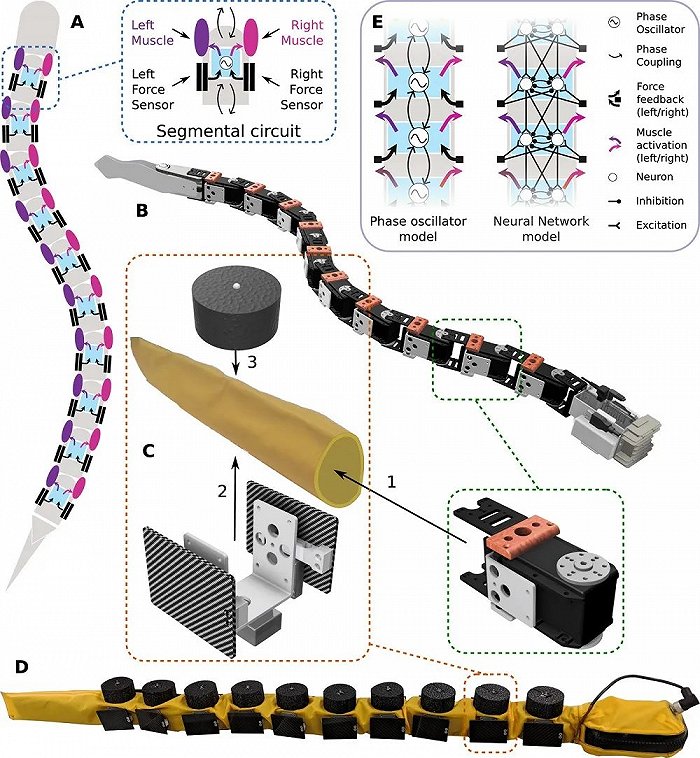 ▲AgnathaX机器人模型
▲AgnathaX机器人模型03.中央加周围神经系统,增强抵御通信中断能力
研究人员通过实验发现,中央和周围神经系统都有助于产生强大的运动。两个系统协同工作的好处是它能够增强抵御神经中断的能力,例如在身体部位之间的通信失败或减弱情况下还能运动。
这项研究的合著者卡米洛·梅洛(Kamilo Melo)说:“换个说法就是通过利用中央和外围组件的组合,机器人可以抵抗更多的神经干扰,保持高速游泳运动。”
研究人员还发现,通过感知机器人身体和水的物理相互作用,机器人外部装备的压力传感器可以提供有用的信号,帮助生成和同步运动所需有节奏的肌肉活动。
因此,当科学家切断机器人不同部分之间的通信以模拟脊髓损伤时,测量水压的压力传感器发出的信号还足以维持机器人实现波浪式运动。
这些发现可用于设计更有效的游泳机器人,用于搜索和救援任务和环境监测。
04.结语:机器人模块化有新思路
机器人模块化设计是很多机器人研究中会考虑的一件事情,更多是让机器人功能得到延展,比如说根据需要改变其形态或加装不同功能的模块,某一模块出现故障时也可以快速更换。
鳗鱼机器人为模块化机器人提供了一种新思路,使用更独立的模块抵抗可能会出现的中枢系统损坏。