参考消息网7月22日报道 据英国《新科学家》周刊网站7月18日报道,一个四足机器人仅用一小时就学会了如何不跌倒地走路,与新生马驹所需的时间大致相当。
报道说,德国斯图加特马克斯·普朗克智能系统研究所的费利克斯·鲁珀特和亚历山大·巴德里-施普罗维茨设计了这款名为“莫蒂”的半米高的机器人,同时让机器人能够自学走路,而不是执行预先设定的步态。
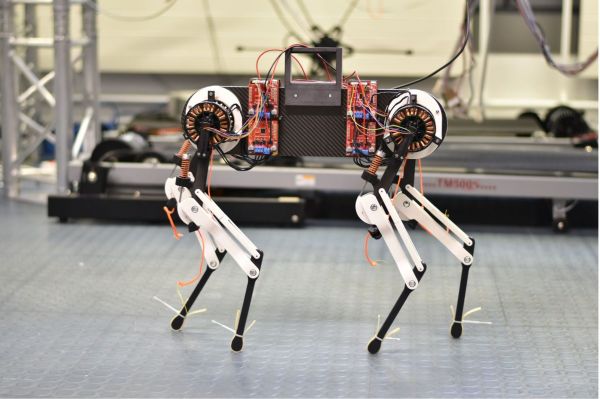 四足机器人“莫蒂”(英国《新科学家》周刊网站)
四足机器人“莫蒂”(英国《新科学家》周刊网站)机器人“莫蒂”由人工智能算法控制,该算法对机器人的腿没有太多信息,比如每个部件的确切形状。人工智能模拟一些动物脊髓中的神经元网络,这些神经元帮助动物以可预测的节奏收缩肌肉以完成行走。
人工智能生成供“莫蒂”遵循的行走指令。然后根据机器人脚部传感器的读数来调整指令,当机器人摔倒并与地面失去联系时,传感器会发出信号。鲁珀特说,一开始,“莫蒂”反复跌倒,但大约一小时后,人工智能找到了最佳的行走方式。
因为人工智能是在学习而不是提前计算每条腿运动的细节,后者会消耗大量能量,所以随着“莫蒂”学习如何走路,它可以降低自身能耗。在一小时的学习过程结束时,机器人行走消耗的能量比刚开始时降低42%。
“莫蒂”的学习过程模仿了动物幼崽学习移动的方式,因为动物幼崽也是通过尝试和最初的跌倒找到了使用肌肉最有效的方式。鲁珀特说:“只要学会正确使用腿,你基本上就能免费获得能效。”
得克萨斯大学圣安东尼奥校区的迪丽莎·库迪蒂普迪说,人工智能往往能够很好地学习一项特定任务,但在环境发生变化时无法重新校准。“莫蒂”的设计依赖持续调整机器人的运动,在这方面可能会做得更好。
美国凯斯西储大学的希勒尔·希尔说,动物的大脑包含帮助它们学习的结构和知识。他说,部分人工智能可以模仿类似动物的学习,但它们的人造神经系统通常还没有那么复杂。
鲁珀特说,他和他的团队正在为“莫蒂”增加传感器和扩大运动范围,使其成为一个更像动物的机器人。#