今天,分享一篇中国学者通过引入智能材料,解决连续型机器人局部刚度的主动调控问题,希望以下中国学者通过引入智能材料,解决连续型机器人局部刚度的主动调控问题的内容对您有用。
来源:DeepTech深科技
连续型机器人在城市搜救、微创手术、杂乱环境巡检等特定场景下,具有明显优于传统机器人的优势。然而,由于连续型机器人受结构刚度的均匀性和单一性问题,在变化的曲率相互作用场景中其运动往往受到限制。
在该研究中,中山大学吴嘉宁副教授团队贡献了核心思想及相应的解决方案,提出了以张拉整体结构作为连续型机器人构型的机构框架,并依托大连理工大学彭海军教授团队的力学分析方法,证明了所提解决方案的有效性。
随后,基于低熔点合金的相变特性,该团队制作了一款热驱动的可编程智能弹性元件,为解决方案的实现提供了技术支持。在该弹性元件力学特性的分析过程中,南方科技大学刘吉副教授团队在材料领域丰富的表征经验为本项研究提供了宝贵的建议。
在该研究中,研究团队通过将低熔点合金(熔点:47℃)注入弹性橡胶管内,提出了一种工艺简易、造价低廉的可编程刚度弹性元件。
由于低熔点合金在室温情况下呈现出固体特性,该弹性元件处于刚度极大的状态;在铜丝加热产生的焦耳热作用下,融化的低熔点合金使弹性元件展现出了弹性的特征,能够产生较大的拉伸变形。基于此,研究人员使连续型机器人内部弹性元件的主动刚度调控成为可能。
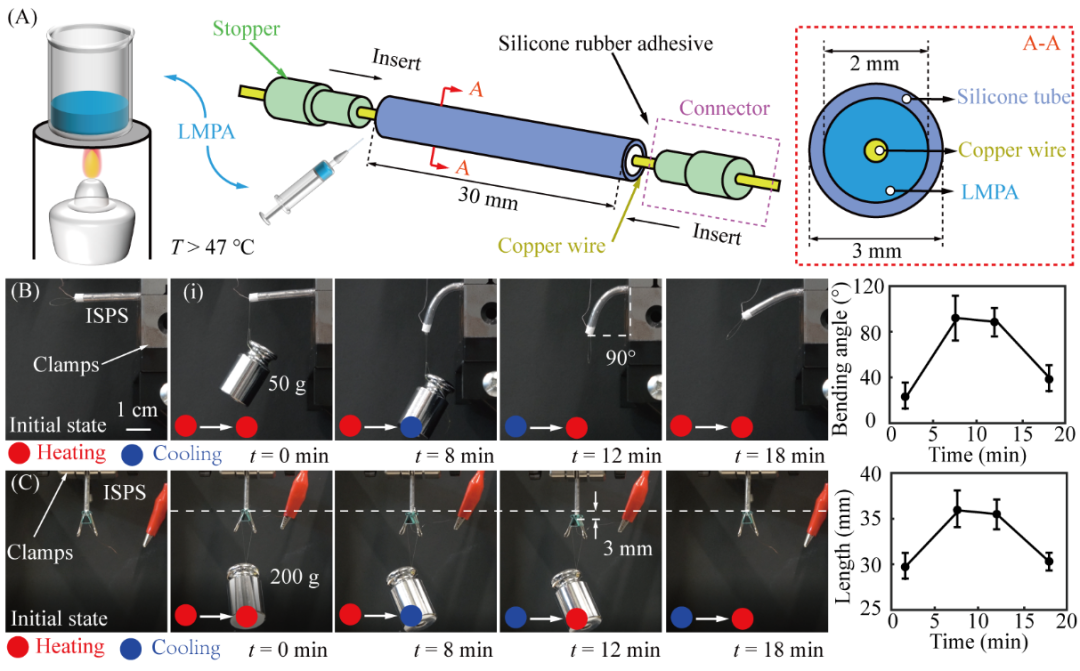 图丨可编程弹性元件的制备过程(来源:Advanced Materials Technologies)
图丨可编程弹性元件的制备过程(来源:Advanced Materials Technologies)为了进一步探究这种弹性元件的相关性能,研究人员分别利用红外热成像技术、拉伸试验装置表征该弹性元件的温度变化及力学特性,并证明该弹性元件的杨氏模量能够在 1.79 和 271.62MPa 间切换。
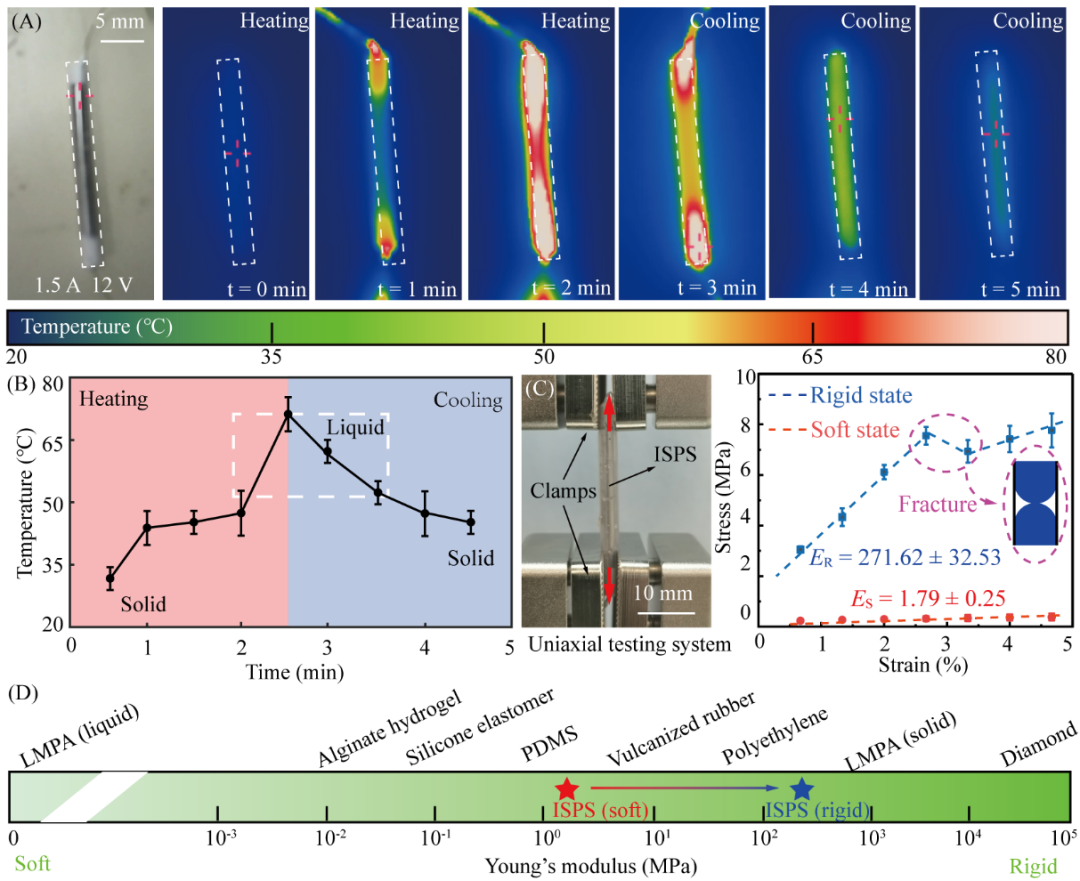 图丨弹性元件的力学特性(来源:Advanced Materials Technologies)
图丨弹性元件的力学特性(来源:Advanced Materials Technologies)基于上述的实验分析结果,充分证明了这种弹性元件能够实现刚度的主动编程。随后,研究人员以张拉整体结构模块为例,展示了模块在装配这种弹性元件之后的各种变形特征。
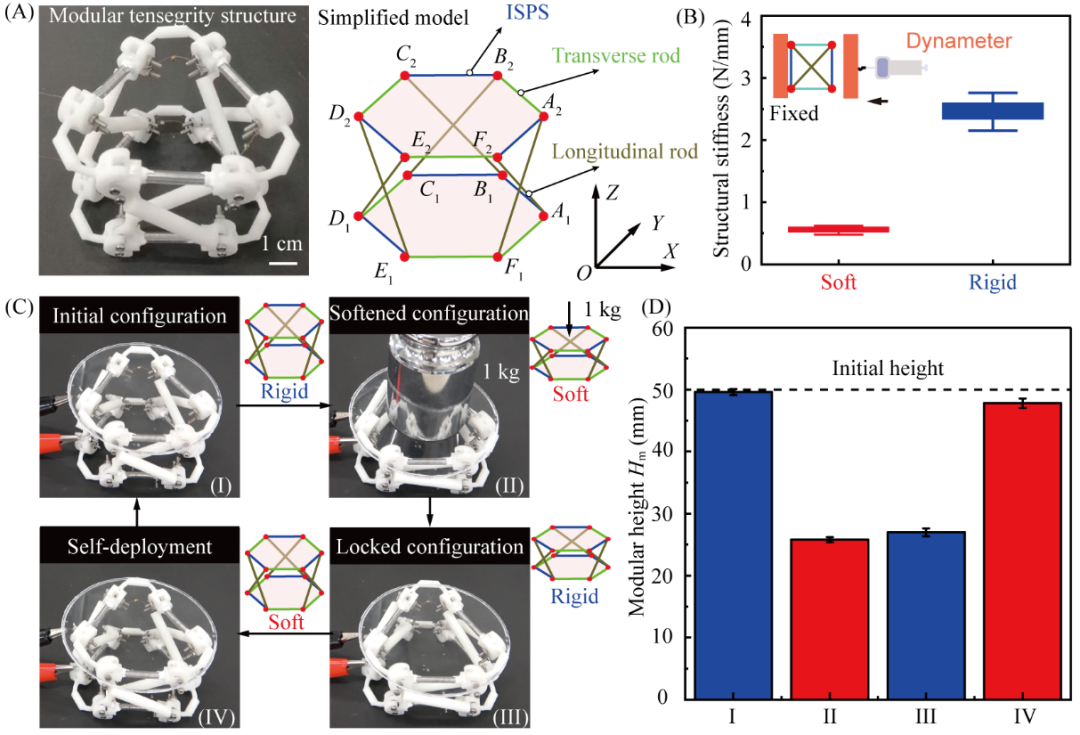 图丨张拉整体结构模块的变形调控(来源:Advanced Materials Technologies)
图丨张拉整体结构模块的变形调控(来源:Advanced Materials Technologies)课题组成员将 12 个张拉整体结构模块串联形成一个连续型机器人,并通过控制电流编程弹性元件的杨氏模量,实现了对连续型机器人局部刚度的主动调控。
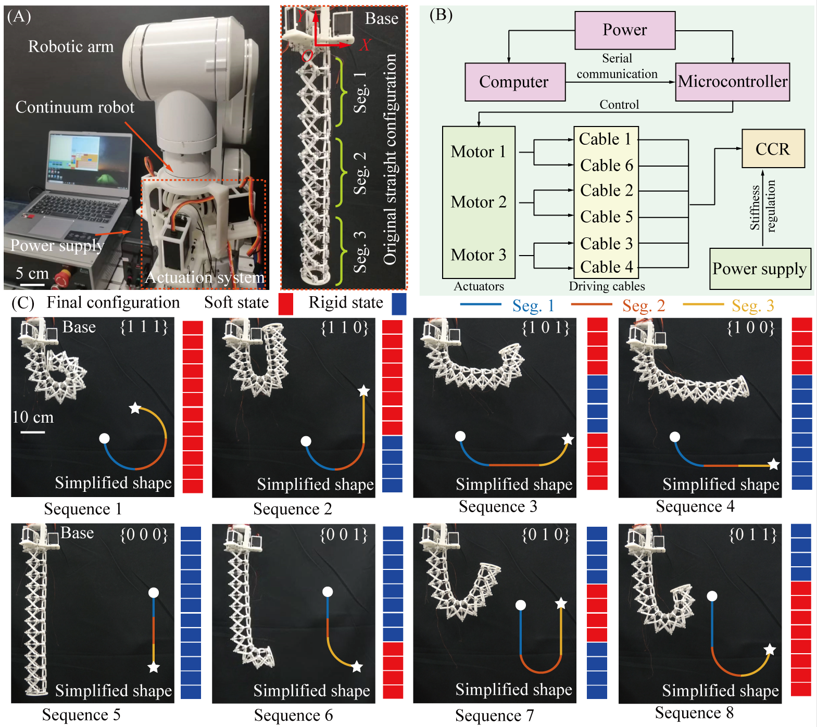 图丨可编程刚度的连续型机器人(来源:Advanced Materials Technologies)
图丨可编程刚度的连续型机器人(来源:Advanced Materials Technologies)最后,该团队采用型材构建了一个迷宫环境,用于评估这种基于低熔点合金的刚度主动调控方案的实际应用价值。相关实验结果表明,通过采用电流加热弹性元件的方式,能够实现对局部刚度的有效调控,进而使连续型机器人能够按照预期的形态与环境交互。
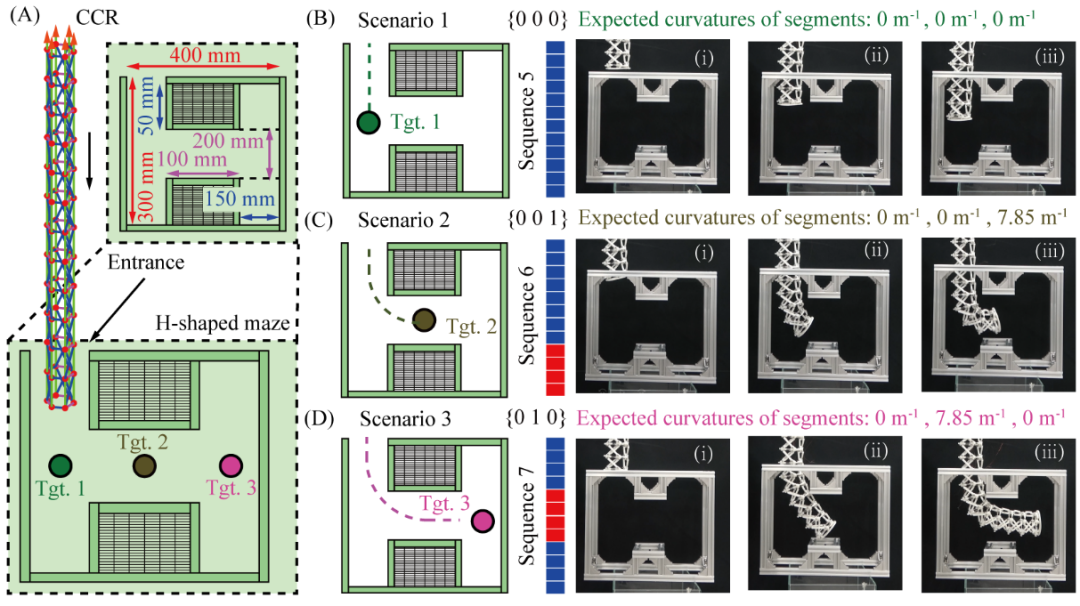
图丨可编程刚度的仿生连续体机器人在 H 型迷宫中的环境交互性能(来源:Advanced Materials Technologies)
尽管该研究已初步实现了对连续型机器人局部刚度的主动调控,但是在刚度调控的实时性方面仍需要进一步提高。
据悉,在未来的工作中,他们将进一步通过结合先进制造模式、智能材料合成等领域,赋予连续型机器人近似生物附器的精巧运动/操作能力,从而使其在面对复杂的环境需求时,能够智能化地与环境共融交互。
 参考资料:
参考资料:1.Jie Zhang, Bo Wang, Haohan Chen, Jianing Bai, Zhigang Wu, Ji Liu*, Haijun Peng*, Jianing Wu* Advanced Materials Technologies(2023). https://doi.org/10.1002/admt.202201616