机器之心报道
编辑:杜伟、陈萍
在移动的机器人骨架上,通过拉伸人类肌腱细胞促进其生长,效果就像人类在移动时所做的那样。这是今天发表在《自然 - 通讯工程》上的一项新研究。
组织工程科学是一门以细胞生物学和材料科学相结合,进行体外或体内构建组织或器官的新兴学科,这一技术虽然在很大程度上处于起步阶段,但迄今为止,皮肤细胞、软骨组织甚至是从人体细胞样本中培育出来的气管都已植入患者体内。
但事实证明,培养可用的人体肌腱细胞是非常棘手的,这需要拉伸和扭曲。在过去的二十年里,科学家们通过反复向一个方向拉伸肌腱细胞和组织来促进它们的生长和成熟。然而,到目前为止,这种方法还不能产生功能完全的组织移植物,用于临床和人体。
来自牛津大学等机构的研究者提出一种新的组织工程方法可能会提高这项工作的质量:在移动的机器人骨架上培养细胞。

论文地址:https://www.nature.com/articles/s44172-022-00004-9
通常,用于再生医学的细胞是在静态环境中生长,这种静态环境包括培养皿和微型 3D 支架等。过去的一些研究表明,细胞可以在像铰链这样的移动结构上生长,但这些结构只能向一个方向拉伸或弯曲组织。
但是,来自牛津大学和机器人公司 Devanthro 的研究人员认为,如果想要培育出能够像肌腱或肌肉一样运动和弯曲的组织,最好是尽可能准确地重现它们的自然生长环境。所以他们决定模仿这样一个移动的人体来培养细胞。
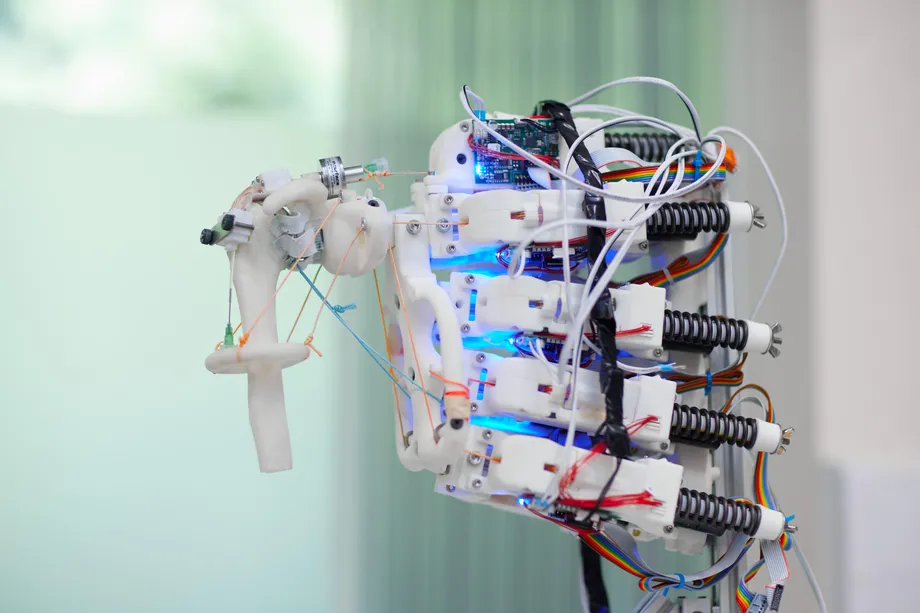
研究团队采用机器人来尽可能地模拟人类肌肉骨骼系统。具体的,他们采用了由 Devanthro 工程师设计的开源机器人骨架,并为可以安装到骨架中的细胞创建了一个定制的生长环境,以根据需要弯曲和拉伸(这种生长环境被称为生物反应器)。
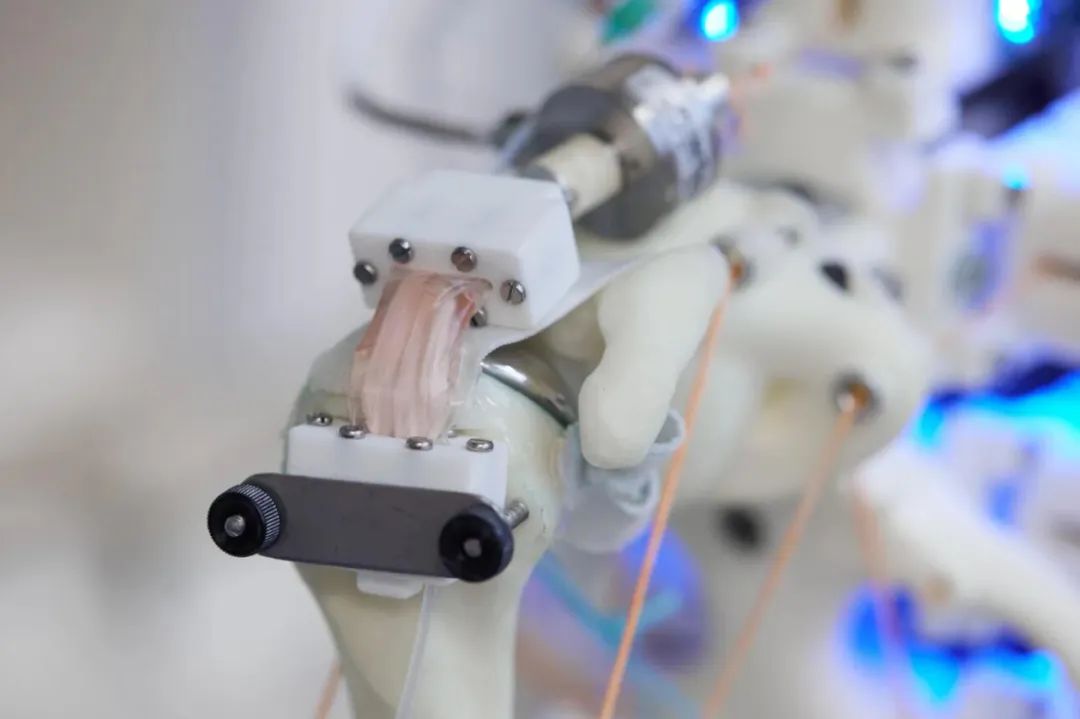
他们选择在机器人肩关节上进行组织培养,研究者也将机器人这个部位进行精度升级,以接近人类动作。然后,他们在机器人肩膀上安装生物反应器,该反应器由生物可降解的细丝组成,在两个锚点之间拉伸,像一束头发,整个结构封闭在一个像气球一样的外膜中。
之后研究者将人类细胞移植到毛发状细丝上,并在腔室中注入一种旨在促进细胞生长的富含营养的液体。在 14 天内每天花费半小时来复制人类会做出的各种抬高和旋转动作。
需要注意的是:虽然团队观察到反应器中运动细胞的变化与在静态环境中生长的细胞不同,但他们实际上还不确定这些变化是否有益。
该项目的首席研究员、牛津大学 的 Pierre-Alexis Mouthuy 表示,他和他的同事在以这种方式生长的细胞中观察到的差异—这些差异是基于测量某些基因的活性和生长—就未来的医学应用而言,这些差异还是不确定的。
「我们确实从机器人肩关节生物反应器的运动中得到了差异,但这些差异是否意味着更成熟的细胞?我们还不知道。我们并不是说这个系统比其他系统更好,我们只是在展示这项研究的可行性。」Mouthuy 表示。
技术概览
20 多年来,机器人生物反应器系统利用机械刺激促进了组织工程(tissue-engineered)结构的生长。但是,我们依然无法生产出能够转化为临床实用的功能性移植物。机器人具有为移植物和植入物提供生理相关机械刺激的前景,这可能会加快它们的临床部署。
为了研究类人生物反应器的可行性,牛津大学设计了一个柔性的生物反应器腔室,它可以连接到改良肌肉骨骼(MSK)的类人机器人肩关节。他们证明,成纤维细胞可以在这个腔室中生长,同时在机械臂上进行生理上的内收外展运动。
在经过 14 天的细胞转录组初步评估后,研究者表明这种加载方案对基因表达谱具有显著影响。并且,这些早期结果有助于探索 MSK 类人机器人成为适用于组织工程和生物材料测试应用的、更具生物力学可能的平台。
调整 MSK 类人肩膀
本研究中使用的机器人为 Devanthro 开源模块 MSK 机器人工具包中提出的肩膀关节的改良版本,最初是作为仿生肌腱驱动的类人机器人 Roboy 2.0 的一部分。
如下图 1a 和 1b 所示,最初的 MSK 肩膀是一个「由位于躯干状支架上的 9 块人造肌肉驱动」的球窝关节。为了提高原始肩膀模型的模仿性,手臂和关节结构被替换成为了图 1d 和 1e 中所示的组件。
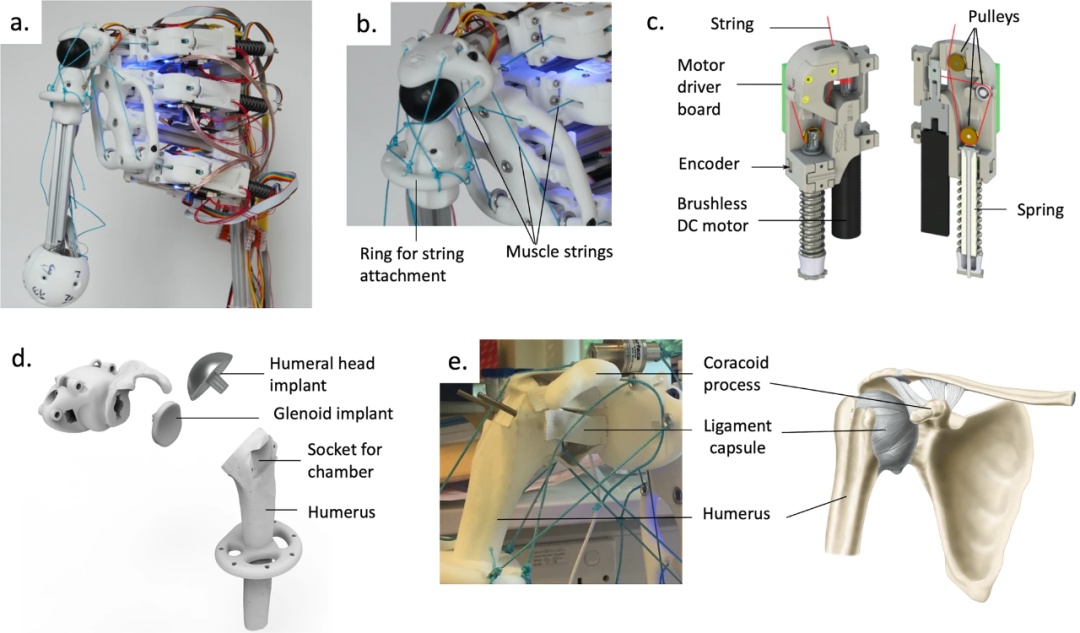
值得注意的是,这个原始类人肩膀既不是面向医疗应用设计,也没有忠实地复刻人的肩膀。它的主要限制之一是缺少在肩部运动中发挥重要作用的肩胛骨,因此该模型只有 3 个自由度(DOF)。
设计柔性、灵活的生物反应器腔室
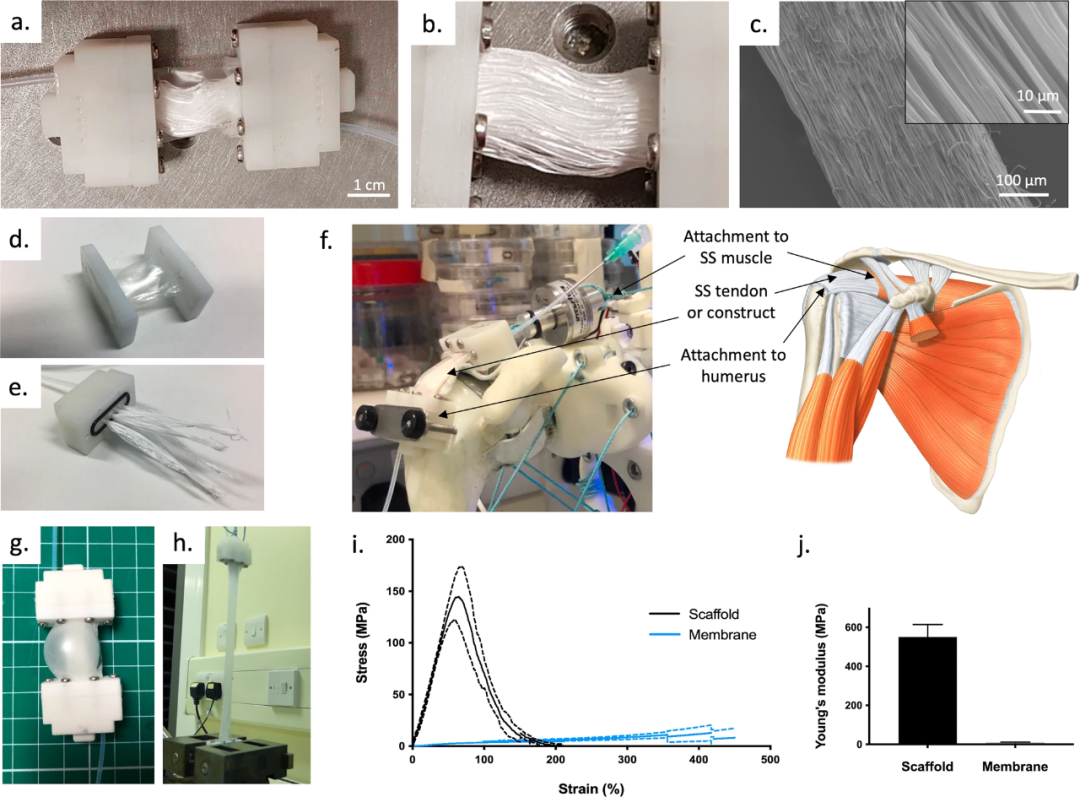
研究者使用的生物反应器腔室的设计和组件如下图 2a-2e 所示,主要组件包括多孔对齐的支架、管状膜和带有连接管的刚性插入物。此外,用于制造腔室的生物反应器组件都被证明具有生物相容性。
机械臂上细胞材料结构的机械刺激
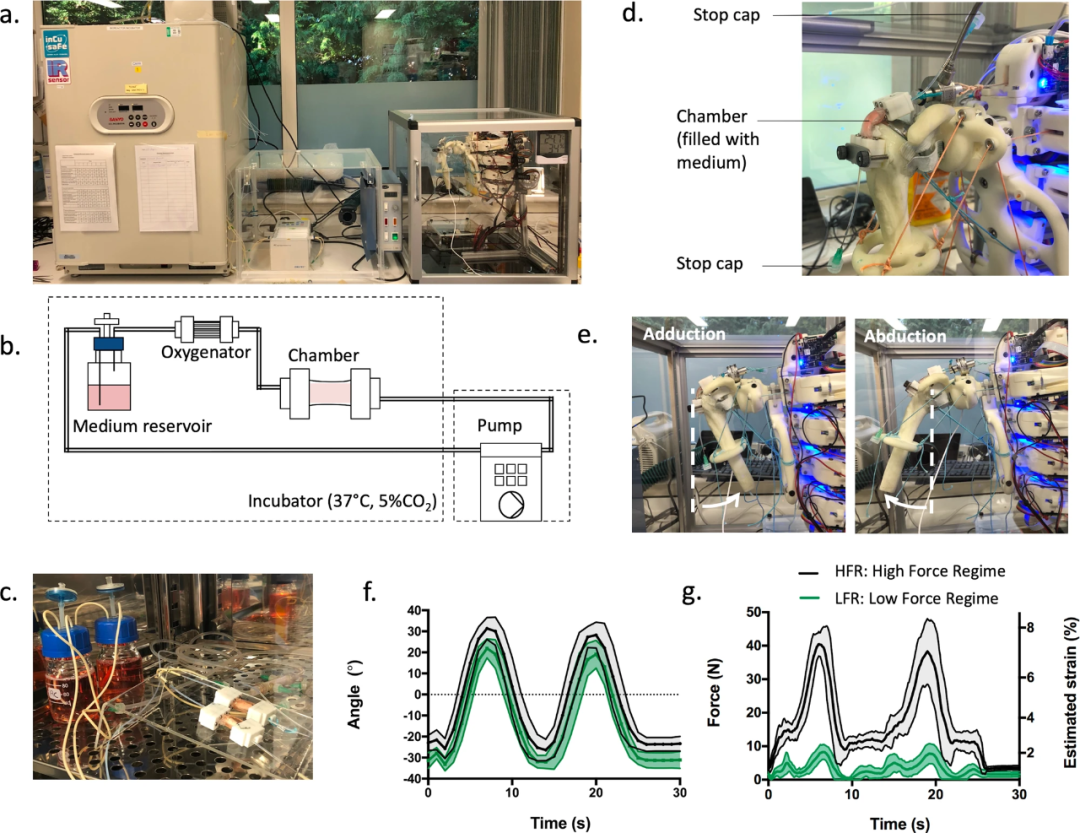
人类成纤维细胞通过入口播种在支架上,然后将腔室连接到位于组织培养箱中的灌注系统。该系统包含一个蠕动泵、一个氧合器和一个带有培养基的储液瓶,它们都通过管道以闭环配置连接,具体如下图 3a-3c 所示。
在灌注期间,腔室内充满了大约 2ml 的培养基,这明显低于现有生物反应器腔室中围绕组织结构的典型体积(通常在 10 到 100ml 之间)。在播种后休眠 24 小时后,动态样品每天转移到类人手臂上持续 30 分钟,以进行内收外展运动,如图 3d 和 3e 所示。
下图 3f 和 3g 中展示了研究者使用的两种加载方案:低力方案(LFR)和高力方案(HFR)。这两种方案都显示出相似的运动曲线,总运动角度约为 60 度。
类人生物反应器系统中的细胞培养
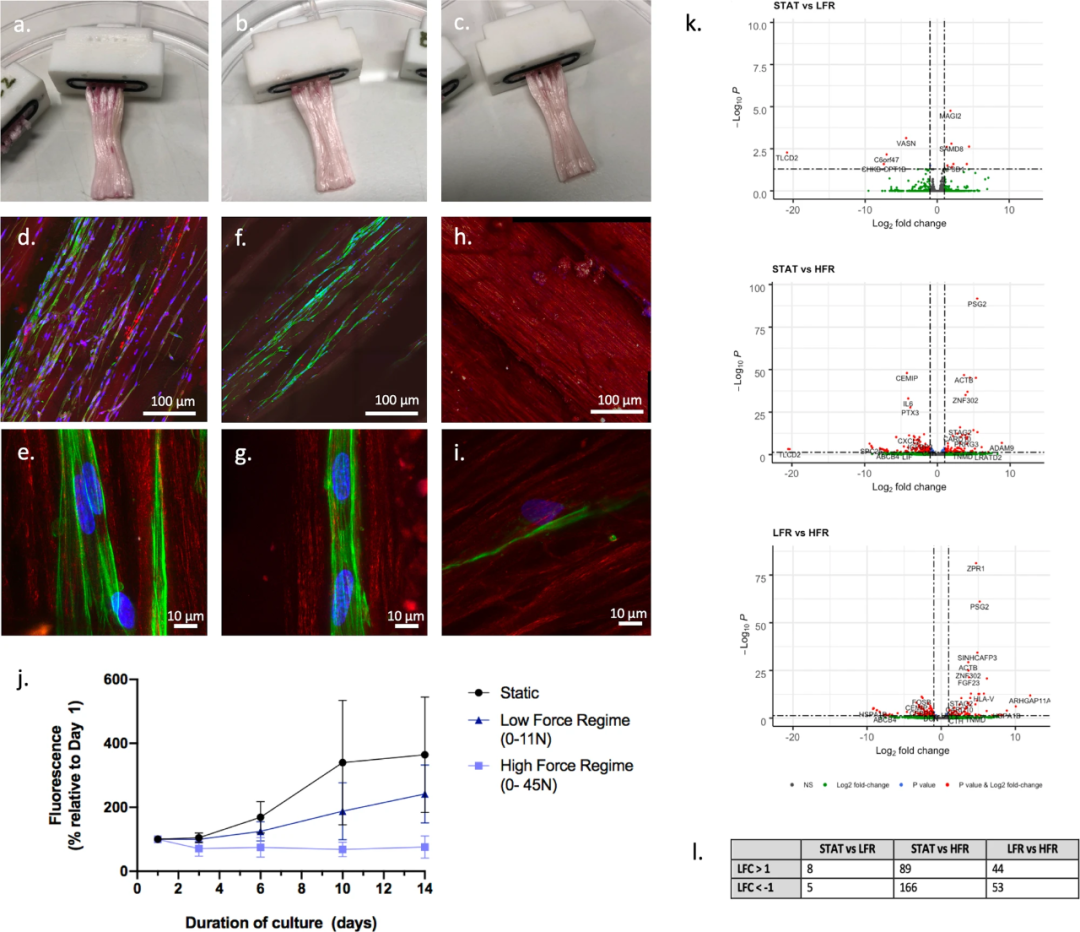
下图 4a-4c 展示了在人类成纤维细胞播种后培养 14 天后样品的整体外观,在宏观上观察不到静态对照(无机械刺激)和动态样品之间的差异。
共聚焦显微镜下表明静态和 LFR 样品中存在细胞,而 HFR 样品中几乎没有细胞,如图 4d-4i 所示。这与图 4j 中所示的细胞增值数据一致,并通过样品冷冻切片的组织学染色得到进一步证实。
研究者在静态对照中观察到了最快的细胞增殖,在 LFR 下观察到的增殖速度稍慢,在 HFR 下观察到的细胞群减少。无论条件状况如何,细胞都展示出了高度拉长的形态。
类人生物反应器策略的潜在应用和影响
研究者展示了使用 MSK 类人机器人通过在柔性生物反应器腔室中培养细胞来支持肌腱组织工程的可行性,其中生物反应器可以在类人机械臂上进行机械刺激。不过,他们表示需要进一步的工作来评估这种策略的全部潜力,尽管有可能克服当前生物反应器系统存在的局限。通过使用机器人结构来复刻人体的复杂力学,可以从力学的角度实现生理和临床相关性。
凭借如此广泛的潜力,MSK 类人机器人的使用可能促使组织工程和再生医学出现变革性进展。目前,组织工程的发展忽略了对先进生物反应器系统的需求。这可能是制造功能齐备的结构的先决条件,防止工程移植物转为临床治疗。毕竟,功能性工程组织移植物对于患者的生活质量(更快更好恢复)、社会(更快重返工作和社会活动)和经济(降低医疗保健的成本)都产生积极的影响。
除了组织工程应用之外,类人生物反应器系统可能成为先进的体外培养模型,用于测试细胞、药物和生物材料。虽然类人生物反应器可能具有各种优势,但重要的一点是它并不打算取代现有的动态平台。相反,它旨在填补尚未解决的临床转化路径中的技术空白。
类人生物反应器的开发和实用性将紧密依赖于机器人技术的进步,未来的工作也将受益于更稳定的机器人系统,它们甚至更接近于模仿人体的生物力学。