文|《中国科学报》记者 沈春蕾
编辑|贺涛
在设障的迷宫中,它可以自主穿行;在松软的沙丘上,它可以行动自如……
它外形像一条螺旋状的意大利面(Rotini,螺丝粉),但其实是一款新型的智能软体机器人。它在5月23日登上美国国家科学院院刊(PNAS),由美国北卡罗莱纳州立大学和宾夕法尼亚大学的研究团队共同研制。

那么,“螺丝粉”是如何变身成为机器人的?
“这条‘螺丝粉’由液晶弹性体材料制成,该材料在温度处于55摄氏度的表面上会发生形变运动。”论文通讯作者、北卡罗莱纳州立大学机械航空系副教授尹杰向《中国科学报》介绍,“因为它可以感知躯体位置并灵活移动,所以我们称其为软体机器人。”
会转弯、会弹跳
 走迷宫
走迷宫从上面的视频可以看到,这款螺丝粉状的软体机器人不仅会转弯,还会弹跳,由此成功完成“密室逃脱”。
论文第一作者赵耀在尹杰课题组从事博士后工作,他发现了这个有趣的现象。他解释道:“我们这款软体机器人是利用自我转向(self-turning)与自我突跳(self-snapping)这两种方式来逃离迷宫的。”
当这条“螺丝粉”的一端碰到障碍时,它会围绕着障碍物转变方向,从而实现自发越障;当它的中间部位遇到障碍物时,它会发生形状的突跳,从原来的向前弯曲(凸形)快速转变成向后弯曲(凹形),从而调转滚动方向来实现自发避障。
自我转向(self-turning)
 自我突跳(self-snapping)
自我突跳(self-snapping)自我突跳往往发生在自我转向出现困难的时候,赵耀称其是一种把积攒的变形能量迅速释放的过程。
在这个过程中,这条“螺丝粉”会稍微跳离地面,并在落地前把自己重新定向。它还会多次尝试突跳,调整滚动的位置与方向,最终自发找到逃离障碍的路径。
“遭遇障碍物时,转向和突跳这两种行为在软体机器人身上对应着一个渐变的区域。”赵耀说,“当接触点落到身体的中部区域,软体机器人会发生突跳;当接触点稍微远离中部区域时,突跳难度增加;当接触点更加远离中部直到在两端1/5身长之内时,突跳会消失,取而代之的是自我转向。”
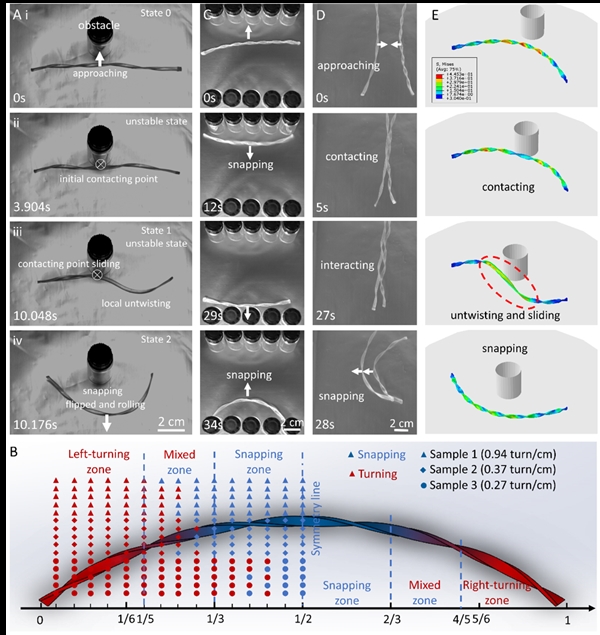 遭遇障碍物时,转向和突跳这两种行为在软体机器人身上对应着一个渐变的区域。
遭遇障碍物时,转向和突跳这两种行为在软体机器人身上对应着一个渐变的区域。“没有芯片程序控制”
此前的研究发现,圆柱状液晶弹性体制成的软体机器人,在一定温度下可以自发地滚动,但它们在障碍物前会出现原地空转的现象。
“我们这款螺丝粉状的软体机器人在遭遇障碍物时的表现却大相径庭。”尹杰说,“不同于前人的研究,给软体机器人注入自我决策能力,它就可以自主地越过障碍物,逃离预设的迷宫。”
为什么前人的研究没能让软体机器人成功越障呢?
赵耀告诉《中国科学报》:“材料还是原来的研究材料,但我们改变了材料的形状。在尝试对其拉一拉、弯一弯、扭一扭后,我发现拉伸和弯曲并没有带来明显变化,适当地扭曲之后出现了很大的变化。”
在将扭曲后呈螺丝状的软体机器人,放置到超过55摄氏度的加热表面上时,赵耀观察到其底部与热表面接触的部分开始收缩,但其它暴露在室温环境中的部位并不收缩,在这种不对称的变形作用下,软体机器人向前轻微地弯曲,从而驱动其自发向前滚动。
在尹杰看来,他们研制的软体机器人有点类似家庭用的扫地机器人,因为它可以移动一些重量不超过它自重的物体。
他还指出:“不同于基于大脑运算的生物智能,这是基于物理智能的智能软体机器人,没有芯片程序控制,而是利用了来自环境的热量实现感知和运动。”
 扫地
扫地有望在太空行走
在实验中,这条“螺丝粉”可以从室外自然环境中吸收能量实现自发滚动,比如在晴天室外的车顶或烧烤架上自行爬行等。

 在晴天室外的车顶或烧烤架上自行爬行
在晴天室外的车顶或烧烤架上自行爬行“热表面温度越高,滚动速度也越快。”赵耀向《中国科学报》介绍,“我们研制的软体机器人自主运动的温度区间是55~200摄氏度。”
研究人员曾尝试将软体机器人放在烈日暴晒的地面上,但因为温度不够高,其无法实现自主运动。
哪里的地表温度可以达到55摄氏度以上呢?研究人员想到了沙漠。
一般机器人在沙漠行走比较困难。但赵耀发现,这款软体机器人可以在各种类似沙漠环境的松散沙地上行走,如履平地。这得益于其锯齿状的轮廓外形,可以通过嵌入沙地来增加爬行抓力,从而在攀爬沙丘时有效地避免打滑或深陷。不仅是沙地,它还成功穿过了凹凸不平的细石子路。
尹杰希望未来可以设计一款智能软体机器人,通过吸收自然界环境中的热量作为能量源,从而自主穿越沙漠等复杂的环境来采集地表信息,并应用于恶劣环境监测与救援等。
他还大开脑洞地展望:“如果液晶弹性体材料能适应更低的温度,并能集成微型传感器,我们有望制成能在太空行走的软体机器人。”
相关论文信息:
https://doi.org/10.1073/pnas.220026511