原标题:自动驾驶还有多远③纯视觉还是激光雷达方案?车企顾虑在哪 来源:澎湃新闻
在刚刚过去的2021世界新能源汽车大会,特斯拉CEO埃隆·马斯克说,特斯拉相信自动辅助驾驶可以完全通过视觉神经网络来实现,因为人就是生物意义上的视觉神经网络驾驶的,所以计算机也一定可以。
长久以来,马斯克一直是纯视觉算法的坚定拥护者。他认为,人工智能通过摄像头看清路况和场景,无需激光雷达这样昂贵的硬件设备。
反对者认为,摄像头的成像是二维图形,然而现实世界是立体的,这样的识别系统势必带来偏差。
此事甚至还曾引发马斯克与何小鹏在社交媒体上隔空互怼。
自动驾驶算法工程师刘奕对澎湃新闻记者表示,“简单来说,自动驾驶由感知、决策和执行三部分组成。感知是一切的基础,不同的感知方式意味着背后不同的算法逻辑,所以不难理解为何业内会对传感器的使用有如此多的争议。”
纯视觉路线:难在算法
自动驾驶车辆想要识别周围环境,就需要通过各种传感器获取大量的环境信息,包括自身状态、其他交通参与者、道路状况、交通标志等等。
目前被广泛使用的传感器主要包括:激光雷达、摄像头、毫米波雷达、超声波雷达等。其中最重要、也是争议焦点的就是激光雷达和摄像头。
特斯拉一直坚持走视觉感知路线,利用人工智能和深度学习来构建神经网络。也就是说,摄像头是特斯拉辅助驾驶系统中最主要的“眼睛”。
以Model 3为例,据中信证券的调研报告,Model 3车身共配了8个摄像头、1个毫米波雷达、12个超声波传感器,视野角度360度,依靠特斯拉的算法来判断周围的状况,为Autopilot自动驾驶系统提供环境信息。
车载摄像头成像清晰,成本低,但探测距离短,对环境光照要求较高,识别稳定性欠佳。
毫米波雷达通过测量回波的时间差算出距离,其优势有探测性能稳定、作用距离长、可穿透烟、雾等,具有全天候、全天时的特点。但受分辨率限制,毫米波雷达难以分辨近距离物体,尤其是对行人的识别能力很差。今年5月起,特斯拉在北美市场交付的Model 3和Model Y已不再配备毫米波雷达。
超声波雷达通俗地讲,就是我们日常使用的倒车雷达。其造价最为便宜,所以被大量应用到车上。但探测距离较短,一般仅有几米。
“从传感器配备就可以看出来,特斯拉对于视觉算法的坚持。优势是成本低廉,但是摄像头也有不少缺陷,需要依靠背后强大的算法,把摄像头捕捉到的二维平面图形转换为精准的三维模型。”刘奕说,“可以理解为一个赛车手开一辆低配置的车辆,车子开得好靠的是大脑而不是硬件。而这位赛车手的大脑,是靠海量特斯拉车主的实际驾驶行为训练出来的,这是其他企业目前无法赶超的优势。”
特斯拉完善视觉算法的一大优势,就是通过真实驾驶数据,进行神经网络训练,从而不断覆盖各类场景,无限接近人类驾驶员的判断方式。
以特斯拉的“影子模式”为例,在这一模式下,系统就像驾驶员的“影子”,实时对比外部环境和驾驶员的操作。若在某个场景中,驾驶员的操作与系统自身的预判不符,则此次数据会被传输到服务器中,用以对算法进行修正训练。
业内不少观点认为,特斯拉的视觉算法已经形成护城河,后来者难以模仿。这一方面来自于特斯拉全栈自研自动驾驶硬件的高算力,另一方面是特斯拉绝对领先的数据规模、数据种类和场景真实性。
在国内自动驾驶企业中,仅有百度的Apollo Lite是纯视觉L4级城市道路自动驾驶解决方案。目前,Apollo Lite的自主泊车产品AVP和领航辅助驾驶产品ANP已实现L2级辅助驾驶商用,并与威马汽车实现了深度合作。
激光雷达:贵在硬件
激光雷达是一类使用激光束进行探测和测距的设备,每秒能够向外界发送数百万的激光脉冲,以此实时建立起周围环境的三维地图。
现阶段,激光雷达因其测量的高可靠性和精确性,仍然是自动驾驶中最重要的传感器之一。即便是特斯拉,也多次被国外网友抓拍到在车辆上安装激光雷达进行道路测试。
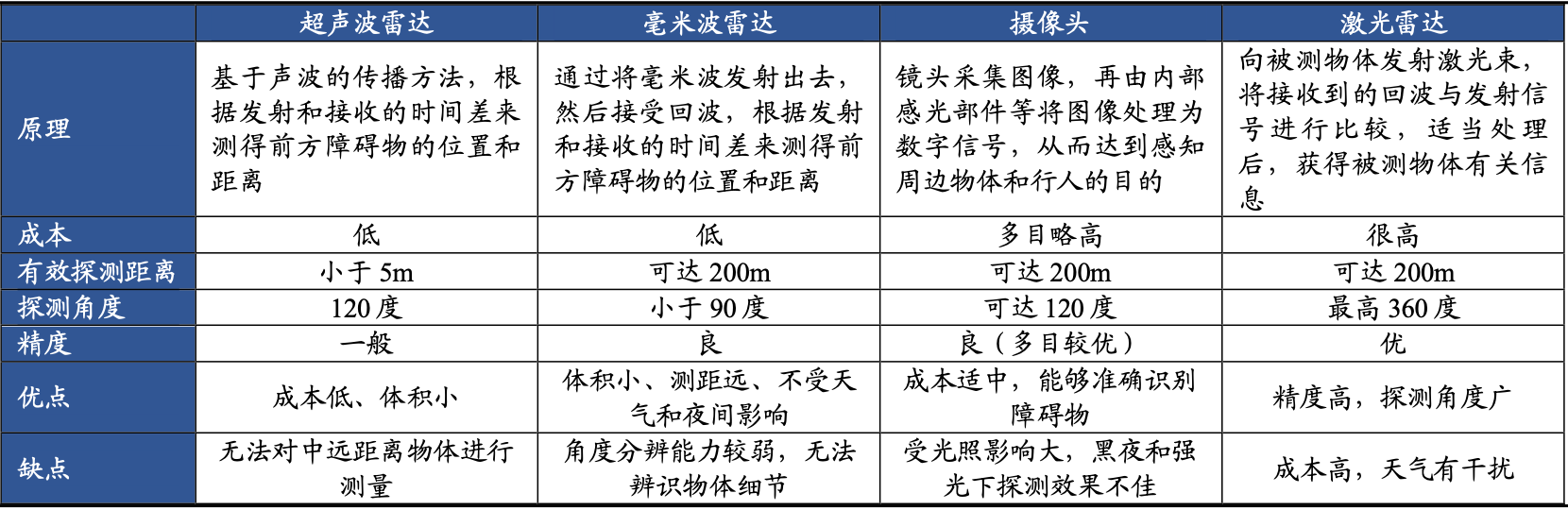
当然,激光雷达也有不少缺陷,最为突出的就是价格昂贵。兴业证券在近期的研报中指出,当前,多数激光雷达的价格仍高于3000美元/颗。
刘奕介绍,“首先,激光雷达识别不了信号灯或道路标识牌信息。其次,对于不规则物体,使用激光雷达比较难以辨别其特征,无法对障碍物进行准确分类。例如路上常见的三轮车,载货状态和未载货状态,识别出来就是两个完全不同的物体。车上装着一只狗和装着一个纸壳箱,可能也无法被归为同一类障碍物。”
在实际应用中,不少企业更倾向于激光雷达为主的组合解决方案,既利用摄像头的高分辨率对目标进行分类,又利用激光雷达的可靠性对障碍物进行检测和测距,融合两者的优点,再辅以毫米波雷达和超声波雷达,完成环境感知。
业内普遍认为,对于Level 3以上自动驾驶必须要用激光雷达。在成本相对不敏感的Robotaxi领域,如Waymo、Uber等典型企业都较早搭载了激光雷达。
在车企中,随着成本不断下降,激光雷达也正逐渐成为标配。蔚来ET7配备了1个激光雷达,小鹏P5搭载2个激光雷达,智己、长城、长安等都将陆续上市搭载激光雷达的辅助驾驶车型。
技术融合将成趋势
汽车工程师苗峰(化名)对澎湃新闻记者表示,乘用车自动驾驶或辅助驾驶最终都由消费者买单,对于消费者来说,最重要的是安全,其次是体验。要实现安全,冗余必不可少。“冗余,说白了就是备份。如果一套传感器失效或出现错误,还有另外一套、甚至两套传感器识别周围环境,这样才能保障人的安全。如果没有冗余设计,自动驾驶系统就只能靠司机来兜底。”
正如前文所提及的,摄像头、激光雷达、毫米波雷达等在功能中各有侧重,也各有优劣。总的来说,激光雷达三维成像、可靠性高,但价格昂贵;摄像头捕获信息丰富、成本低,但依赖环境光照(例如此前特斯拉自动驾驶系统错误识别大货车侧面造成事故),容易产生误差。
“对于自动驾驶安全冗余来说,激光雷达和摄像头是互补关系。如果进行融合,就能获得安全冗余性更强的感知系统。”苗峰说道。
国内自动驾驶企业,除百度Apollo Lite之外,基本都是采取了融合技术路线。以小马智行为例,目前其自动驾驶乘用车配备了4个激光雷达、4个毫米波雷达、7个摄像头以及2个GNSS天线。小马智行相关负责人对澎湃新闻记者表示,小马智行目前的自动驾驶技术解决方案采用多传感器融合技术,就是为了充分利用各传感器的优势、弥补各自的短板,同时确保自动驾驶的安全性和系统冗余。
刘奕对澎湃新闻记者表示,“其实视觉和激光的争议,都是有关单车智能的。目前在中国的发展趋势是智能网联,还会有高精地图、车路协同、V2X(vehicle to everything)等各路技术,自动驾驶一定是一个多元融合的领域。”