原标题:从三体宇宙公理,到自动驾驶的“认知智能” 来源:企业供图
【猎云网北京】3月12日报道
当下,人工智能被分为三个阶段:计算智能、感知智能和认知智能。在计算智能方面,强大的算力,足以让机器的能力远超过人类;传感器和机器学习算法的融合,让机器在感知智能方面,也可与人类相媲美;而机器在理解、思考、推理等认知能力方面,却与人类存在很大的差距,所以认知智能是目前人工智能主要攻坚的方向。
当下,自动驾驶汽车可以通过摄像头、激光雷达等众多感知设备和人工智能算法来实现感知智能,成为感知智能领域的集大成者,拥有对复杂道路环境的感知能力。但认知能力的缺失,让车辆AI在面对决策信息时往往难以做出正确的理解,使得目前的自动驾驶汽车无法像人类驾驶员一样,在任意环境和速度下安全行驶。
如何让自动驾驶汽车拥有认知智能?
根据第一性原理推断,拥有了认知智能的无人车,应该像人类驾驶员一样,是具有学习、决策等行为能力的认知主体,除了需要解决车的感知智能、信息融合、规划、决策、控制等问题,还需要具备对随时变化的交通环境数据进行推理和推断的功能。但目前市场上的算法和车载算力,实现这些能力并不现实。
在3月3日“毫末智行品牌日”活动上,毫末智行CEO顾维灏借助小说《三体》中的宇宙社会学理论,对自动驾驶的“认知智能”进行了更为形象的诠释。

毫末智行CEO顾维灏
“今天可以看到70岁的老人和20岁的年轻人同时在路上开车,虽然他们看到的东西都是一样的,但是他们驾驶的方式却是完全不一样的,这就是认知智能最核心的区别。”顾维灏表示,人的技术动作往往是由一些底层的思想和逻辑决定的。在《三体》小说中,有人总结了宇宙社会学的几个公理,也是构建整个三体宇宙的基础逻辑:第一,生存是文明第一要务;第二,文明需要不断扩张,但宇宙的物质总量保持不变;第三,猜疑链;第四,技术爆炸。
顾维灏将此类比到自动驾驶的认知智能方面,人类驾驶员在日常开车中,也会总结一些经验,比如“在事故多发场景下保持警惕,提前规避;避免出现在其他交通参与者的感知盲区”等,把这些经验总结成了一些公理,再通过专家系统、模式匹配等应用实例找到这些问题的解决办法。
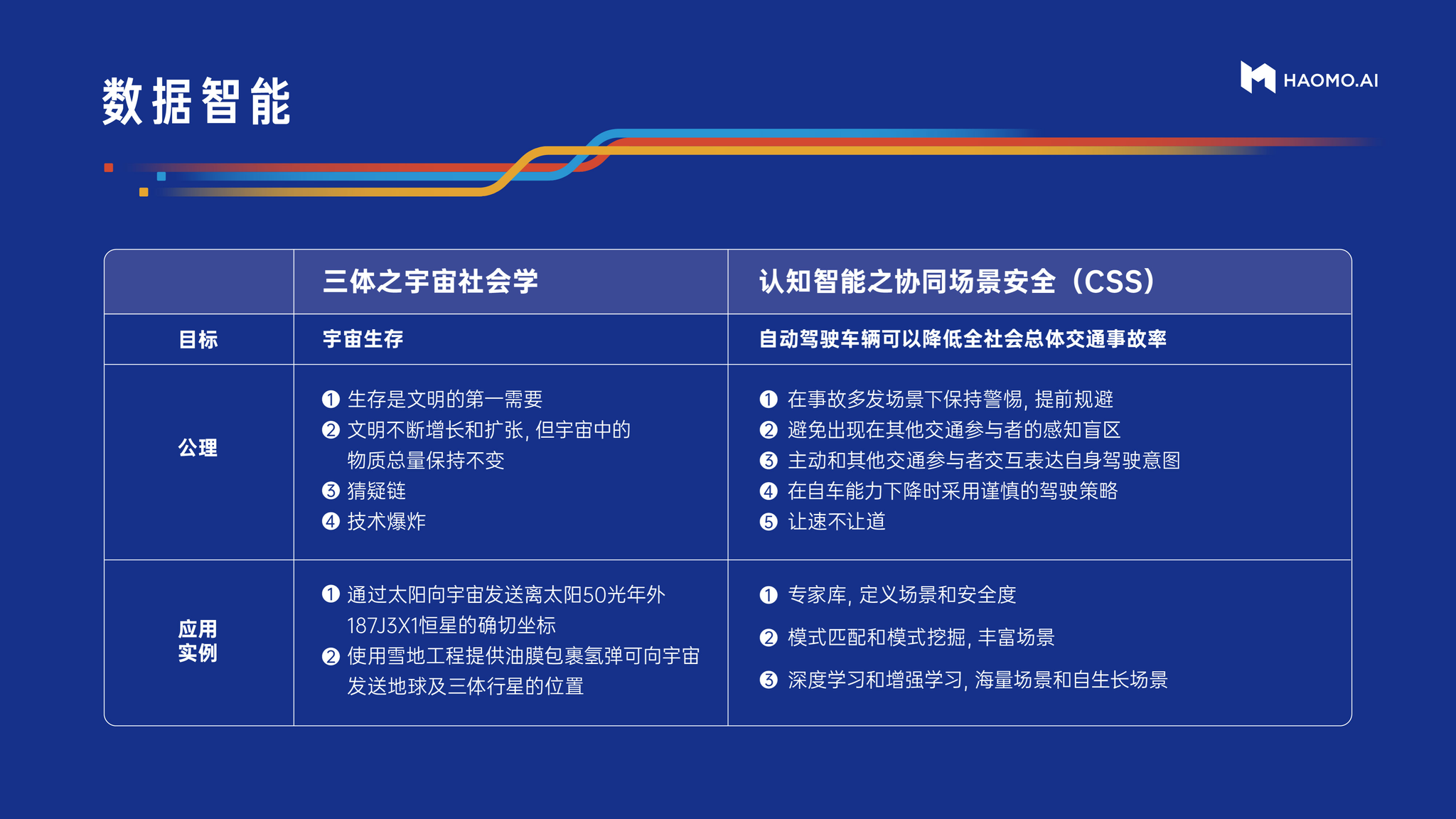
毫末智行就是运用这样的思想,通过名为“CSS协同的场景安全模型”来构建自动驾驶认知智能最基础的根基。
毫末模式与数据智能
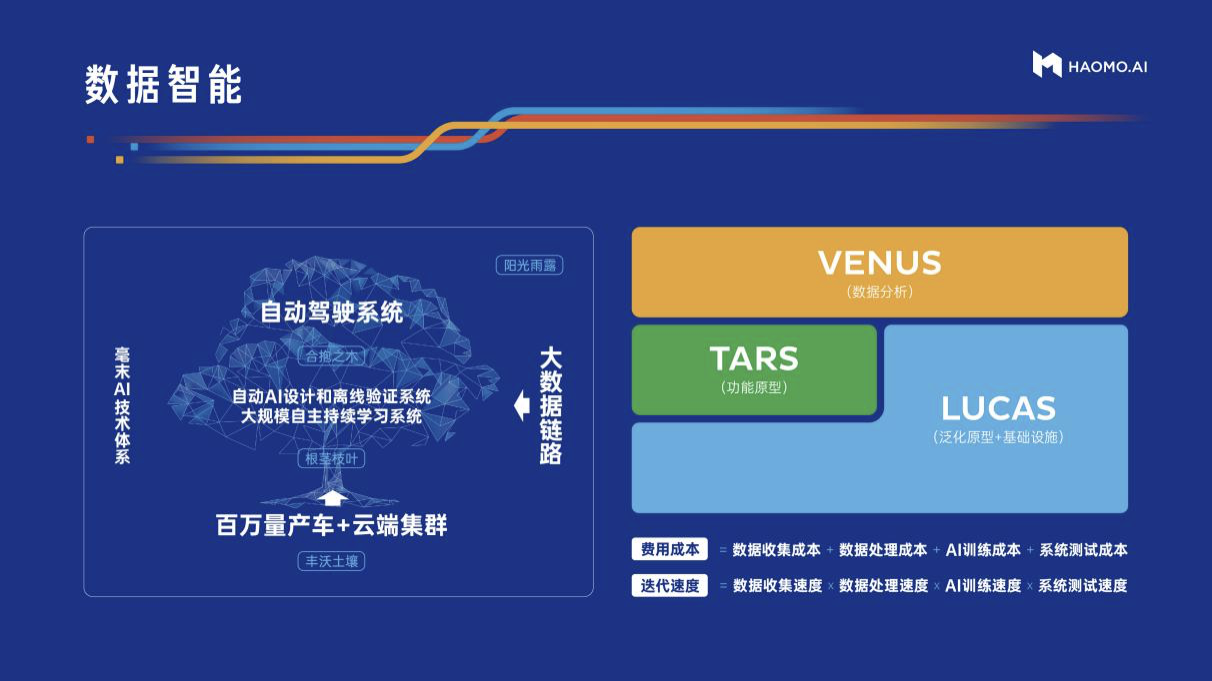
毫末智行以阿拉善沙漠中无人车与冠军车手竞速对决,出现在人们的视野中,并于今年2月拿到了Pre-A轮数亿元融资。“毫末”一词取自于一句古话,“九层之台,起于累土。合抱之木,生于毫末。”公司成立一年来,已经通过主机厂、互联网公司以及投资方等各方人力、智力和资源的努力,一枝一叶地构建起了“数据智能”的参天大树,一步步打造属于自己的毫末模式。
1.自研域控制器,优化E/E架构
“之前的出行工具主要是采用分布式架构,单个ECU的算力并不是特别高,实现整车的功能单纯靠通讯就能够满足。在这个时代,每增加一个功能,就需要在车上增加一个ECU,随着汽车功能越来越多,增加的ECU也是越来越多。据不完全统计,现在采用分布式架构的出行工具,其ECU的数量已经超过了200个,所以不得不考虑采用更大算力的计算平台,让不同的功能能够在同一个控制器上去运行,这样整车出行工具就进入了域控制器时代。”毫末智行董事长张凯表示。

在未来的出行工具中,无论是认知智能还是感知智能,都对算力要求更高。所以,未来的趋势是中央的计算架构,拥有超高的计算力和超大的通讯带宽,软硬件可以实现分离,以支持跨域的融合。随着软件不断升级,智能出行工具也将具备自生长的能力。
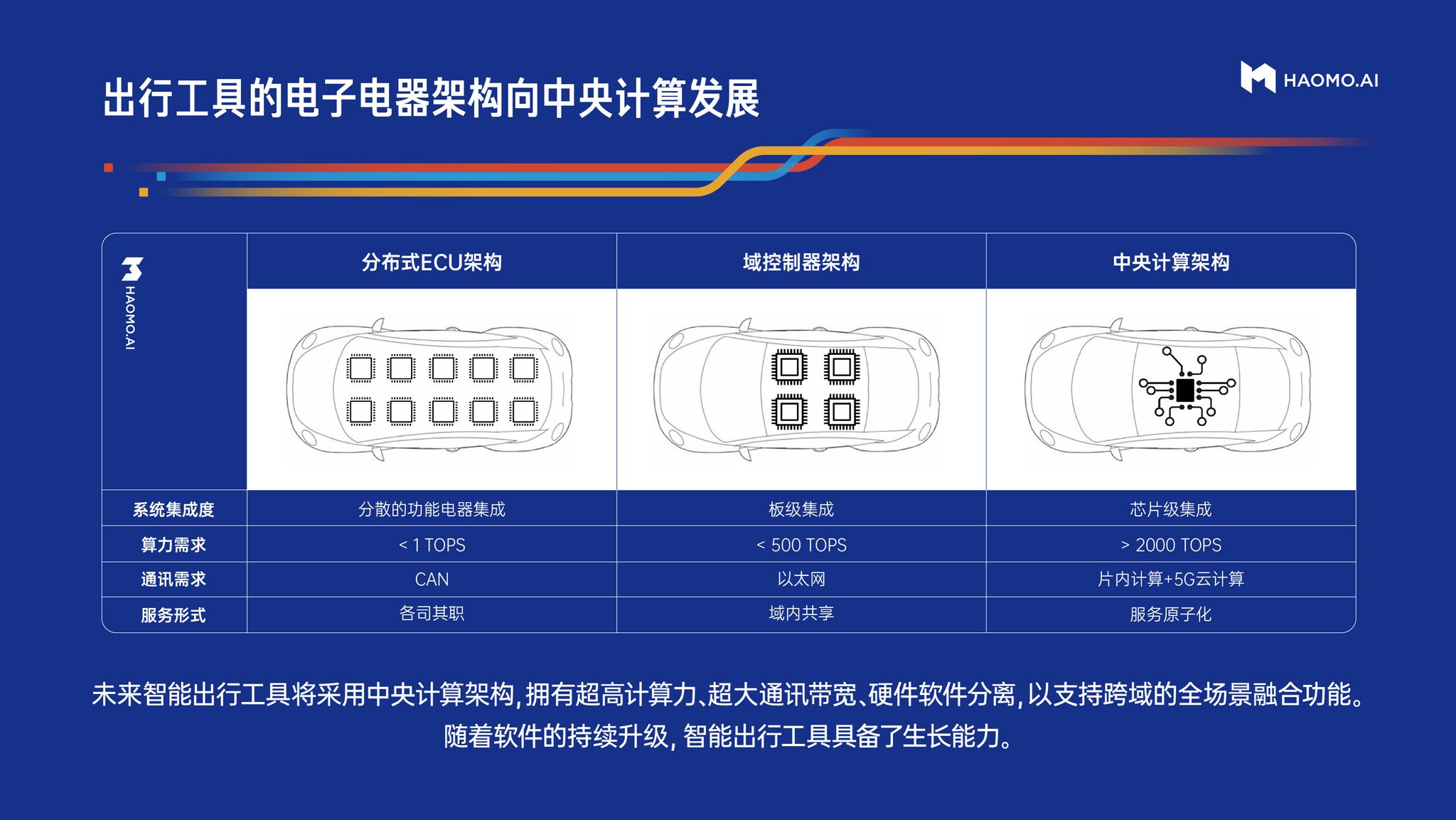
为了进一步集中算力,优化电子电器架构,并做好向中央计算架构的过渡,毫末智行自研了域控制器,采用多核异构架构设计,满足车载ASIL-D功能安全级别,可以承担L3级自动驾驶技术的数据融合、决策、控制、定位功能,是国内首个自主研发TC397+EQ4方案。
搭载该控制器的乘用车自动驾驶产品计划在今年投入了市场,长城汽车方面表示,这将是国内首个达到L3级产品能力、具有量产激光雷达、具有NOH能力的自动驾驶产品,将在系统安全、产品体验、自动驾驶场景覆盖三个方面达到国内自动驾驶领先水平。
2.完备的全冗余方案,保障安全

系统的安全冗余是保障安全的关键一环。据公司首席交付官甄龙豹透露,“毫末智行全冗余方案主要分自动驾驶系统本身和整个车辆平台本身两大部分。从自动驾驶系统本身,做到了感知和计算的冗余,激光雷达会作为我们感知冗余最重要的一环,普通的摄像头有其劣势,比如说过度曝光,夜晚场景,包括大雨天气等等会导致摄像头功能失效,这时可以靠激光雷达来弥补这些劣势,这正是我们打造的感知冗余。
计算冗余,两个控制器系统完全独立运行,可以做到两个系统实时交互,实时互相接管,这是从系统层级来讲。放到整车层级来说,整车为了支持这两部分,构建了EV架构的冗余,多条通信链路的冗余(包括主通讯链路和备用通讯链路)。一路走网关,一路自动驾驶系统直接驱动。
转向冗余,目前市场上转向冗余主要靠人来实现,当EPS失效之后,主要靠人来打转向,靠人把车开回家,而我们的产品是,当一路转向失效之后,另外一路转向可以完整地、安全地把你送到目的地。
自动冗余,这是靠ESP和IBOOSTER互为备份实现的,当ESP失效之后,IBOOSTER需要接管。但这不是各装一个ESP和IBOOSTER就可以实现的,因为我们需要共同分析共因失效,每一个共因失效原因有哪些、单独失效原因是什么……只有所有的共因失效都做了详细分析,才可以在一路失效之后,让另外一路有效接管。
还有最重要的是电源冗余,单独打造两路电源,一路专门支持自动驾驶系统,另外一路对整车自动驾驶系统同时支持。比如说ESP和IBOOSTER就需要分别挂在两路电源上。”
3.风车战略:一边自我造血,一边数据能力迭代

目前,自动驾驶正在以“从低速到高速、从载物到载人、从商用到民用”的规律递进、向前发展。基于此,顾维灏是这样理解“风车战略”的:利用成本和规模优势,基于数据智能,从乘用车、低速无人车生态平台和智能硬件三个方向进行布局。
数据智能是风车的轴,三条业务线就是风车的三个扇叶。其中,数据智能是核心能力,而三个业务不断向数据智能提供数据,让数据智能这个“中央大脑”不断进化,进化后的“大脑”再把迭代升级的无人驾驶能力反哺给三个业务。这样,它们彼此之间就形成了正向循环,能够互相促进和带动,整个风车也就转动起来,越来越快。
毫末希望通过这三叶不断地去收集场景数据,促进数据能力的迭代。同时,这“三叶”收集来的场景数据能够实现共通、并彼此支持,然后贡献到数据智能的轴里,最终带动产品的发展。
国内自动驾驶赛道的黑马

这个“含着金汤匙”诞生的公司,背负了太多期待,俨然一副“未来独角兽”的姿态。顾维灏认为,当前全球自动驾驶行业主要有三种发展模式,一种以Waymo为代表,第二种以特斯拉为代表,第三种以通用汽车+Cruise为代表,Cruise模式的出现为自动驾驶行业发展模式提供了新的可能性,毫末智行正是这一模式在国内自动驾驶行业中的典型代表。
目前,在无人驾驶物流车产品上,毫末智行已经与顺丰、多点等客户签订了合约。无人驾驶乘用车产品也即将商用。成立仅一年多来,毫末智行以一个最小化产品起步,在乘用车领域、低速无人车生态平台领域都已取得了不俗的成果。期待毫末智行的产品在市场上进一步被验证,希望这家打造“认知智能”的自动驾驶公司能够走得更远。