原标题:能滑、能越障碍、能空翻,中国全新轮腿式机器人亮相
今天,一个轮腿式机器人的视频刷屏朋友圈。
视频中,其不仅能在多种地形上平稳滑动,还能灵活越障,做出360度后空翻等高难度动作。
此前两日,腾讯 AI Lab 及 Robotics X 实验室主任张正友在机器人行业顶会 ICRA 2021 上也首次介绍了Ollie的技术细节。
轮腿式机器人Ollie在视频中表现了双轮平衡、多模态移动、跳跃、360度空翻等运动能力。
 最低身高只有 35 厘米的 Ollie,可以跳上 40 厘米的台阶,竖直起跳高度最高可达 60 厘米。
最低身高只有 35 厘米的 Ollie,可以跳上 40 厘米的台阶,竖直起跳高度最高可达 60 厘米。 能轻松完成 360 度空翻挑战。
能轻松完成 360 度空翻挑战。 在平地上时,抗干扰能力极强。
在平地上时,抗干扰能力极强。轮腿式机器人(wheel-legged robot)即兼具轮式优势和腿部能力的机器人,平地移动快、效率高、噪音低。形象地说,腿轮结合的好处在于既有动物腿脚的灵便性和跃障能力,又用轮子克服了腿脚平面运动时能耗大、动力效用低等问题。
腾讯公告表示,Ollie的运动能力源于腾讯Robotics X实验室的最新研究进展:非线性控制技术、全身动力学控制和轨迹规划。
非线性控制技术让机器人具备良好的平衡能力,此前实验室研发的自平衡自行车已应用同类技术,在静止及行进状态下均保持平衡不倒。针对轮腿式机器人的形态和特点,实验室研发团队做了适应性调整,使机器人Ollie在大角度倾斜时也具有良好的平衡能力和鲁棒性(Robust音译,指在异常和危险情况下系统生存的能力)。
全身动力学控制让Ollie有了“小脑”,其采用最优化方法求得各关节力矩来实现全身姿态调整,使其在面对突如其来的巨大冲击如在空翻落地和遇到碰撞时能抵抗外界干扰,保持平衡。
Ollie还拥有轨迹规划能力,可以提前“规划”好运动轨迹,最大程度地发挥关节电机性能来实现目标运动。
轮式机器人Ollie在运动规划、平衡与稳定性上取得突破,相关研究论文被 ICRA 2021 收录(ICRA 全称 IEEE International Conference on Robotics and Automation即国际机器人与自动化会议,是机器人领域最有影响力的国际学术会议之一。)
 在此前,也有过一些轮足式机器人的研发。波士顿动力在2019年推出的轮足式机器人Handle,可实现平稳地走、跑、跳以及下坡、空中旋转、穿越障碍等一系列动作。其继承了上一代机器人Atlas的控制算法,有AI近似拟人的运动平衡能力。比如在路况不明确时,其可以完成类似人类先将脚踩在路面上估算路面承重能力的动作。后波士顿动力与自动驾驶公司OTTO Motors达成了合作,将轮足式机器人Handle与OTTO运货机器人协作应用于仓储环境。
在此前,也有过一些轮足式机器人的研发。波士顿动力在2019年推出的轮足式机器人Handle,可实现平稳地走、跑、跳以及下坡、空中旋转、穿越障碍等一系列动作。其继承了上一代机器人Atlas的控制算法,有AI近似拟人的运动平衡能力。比如在路况不明确时,其可以完成类似人类先将脚踩在路面上估算路面承重能力的动作。后波士顿动力与自动驾驶公司OTTO Motors达成了合作,将轮足式机器人Handle与OTTO运货机器人协作应用于仓储环境。
Ascento系列机器人由苏黎世联邦理工学院的团队研发,兼顾了双轮滚动和弹跳技能,可完成垂直跳跃,具有较好的自平衡能力。Ascento机器人的设计主要参照了Handle。从《Ascento: A Two-Wheeled Jumping Robot》中得知,该机器人主要用于室内巡检,平整地面用轮子快速移动,并通过跳跃来越障。
 腾讯这次发布的轮足式机器人Ollie相较于前者,最直接可观察到的亮眼表现就是轮足式机器人的360度空翻。
腾讯这次发布的轮足式机器人Ollie相较于前者,最直接可观察到的亮眼表现就是轮足式机器人的360度空翻。Ollie 所在的腾讯Robotics X实验室成立于2018年,主攻移动、灵巧操作和智能体三大机器人核心通用技术的研究与应用。2020 年 11 月公开两项移动机器人:可以走梅花桩的四足机器人Jamoca,以及两轮式移动机器人。2021年3月公开机器狗Max。轮腿式机器人Ollie 是第四代,积累了实验室的移动控制技术,并在运动规划、平衡与稳定性上重点突破。
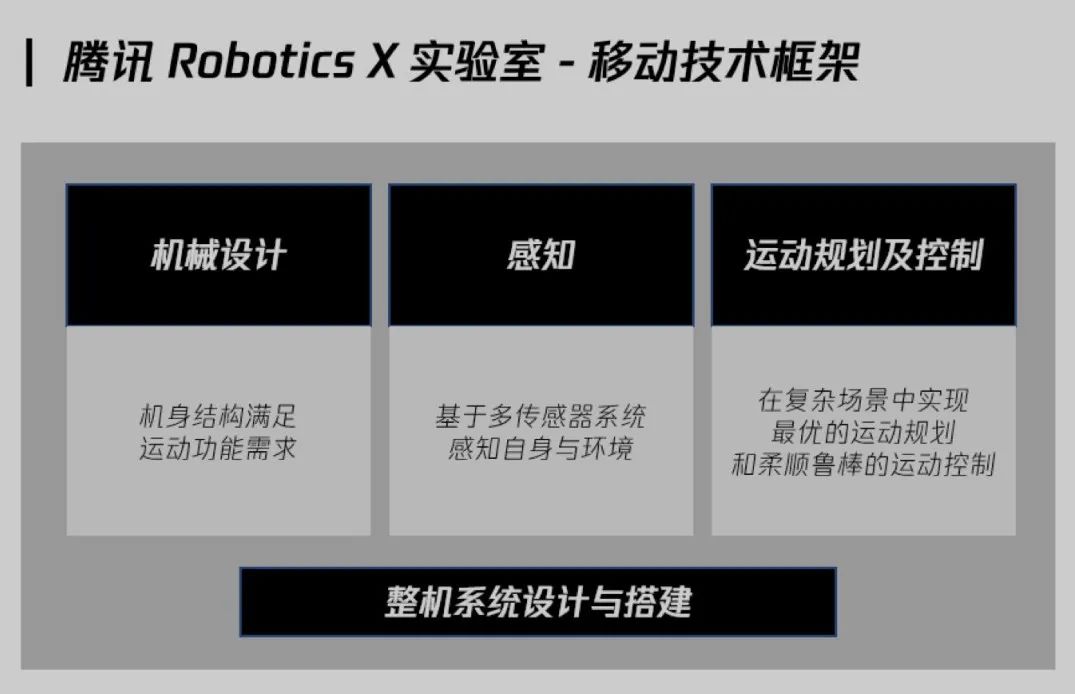 Robotics X实验室移动技术框架包含机械设计、感知、运动规划与控制,以及融合这三者的整机系统设计与搭建等四大模块,它们分别可理解为机器人的躯干、眼睛、大脑,以及各“器官”协调的能力。Ollie超强的“轮滑”、“空翻”能力就来源于这些“器官”协调后的结果。
Robotics X实验室移动技术框架包含机械设计、感知、运动规划与控制,以及融合这三者的整机系统设计与搭建等四大模块,它们分别可理解为机器人的躯干、眼睛、大脑,以及各“器官”协调的能力。Ollie超强的“轮滑”、“空翻”能力就来源于这些“器官”协调后的结果。目前 Ollie 还处于研发阶段。未来,Robotics X 实验室将基于轮腿式机器人平台的机动性特点,拓展平台上感知、负载等各功能模块搭建,让机器人具备更成熟、更丰富的能力。