原标题:研究人员完成了针对动物晶须毛囊机械感受器的力学模拟 来源:cnBeta.COM
来自西北大学的一支研究团队,刚刚开发了一种新的机械模型,特点是能够模拟胡须是如何响应外力、并在毛囊内发生弯曲的。在发表于 PLOS《计算生物学》开放期刊上的一篇文章中,该校 Yifu Luo、Mitra Hartmann 及其同事们,详细介绍了《限制毛囊内触毛变形》的这项新发现。
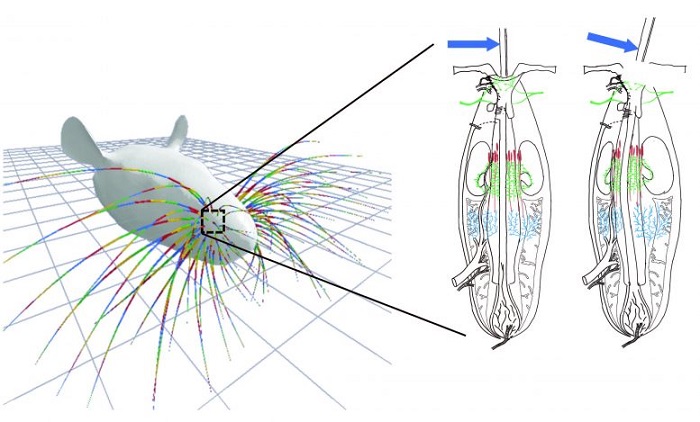 晶须在毛囊内的形变轮廓,决定了不同组机械感受器的活动。
晶须在毛囊内的形变轮廓,决定了不同组机械感受器的活动。SCI Tech Daily 指出,除了某些灵长类动物,大多数哺乳动物都在使用胡须触感来探索周围环境。
不过晶须在其延长方向上并没有感受器,而是在受到外力而变形时,让根部毛囊来感知推拉,从而触发神经系统中的信号。
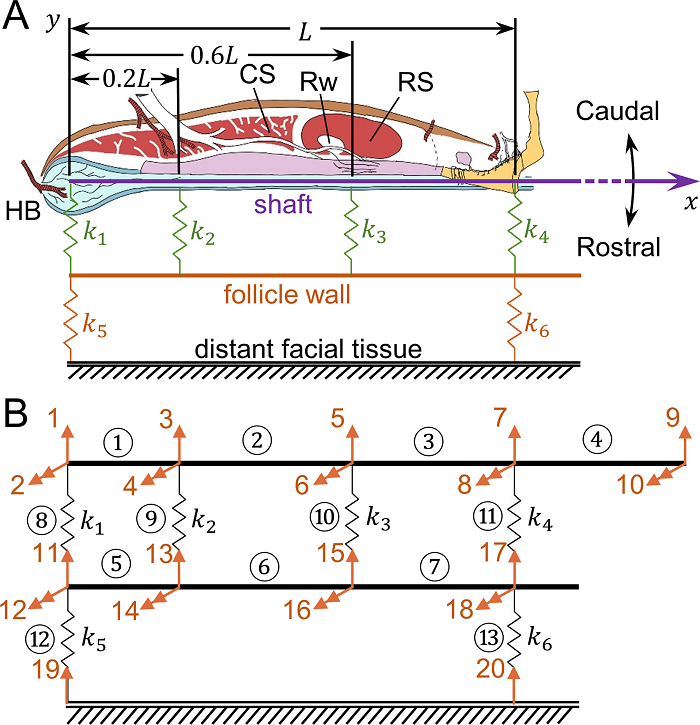
 研究配图-2:实验流程与坐标系示意
研究配图-2:实验流程与坐标系示意此前鲜有研究团队深入了解晶须是如何在毛囊内发生形变、并撞击到内部的感知细胞(机械感受器)的。
为了更好地理解这一过程,Yifu Luo 与同事们利用了晶须毛囊实验研究的相关数据,并打造了首个能够模拟毛囊内晶须形变的力学模型。
 研究配图-3:梁簧模型的机械公式
研究配图-3:梁簧模型的机械公式模拟表明毛囊内的晶须最可能发生“S”形弯折,不过未来的实验数据可能给出“C”形的答案。
研究人员已证明,这些形状估计值能够用于预测晶须是如何推拉位于毛囊不同部位的不同类型的机械感受器,从而影响发送到大脑的触感信号的。
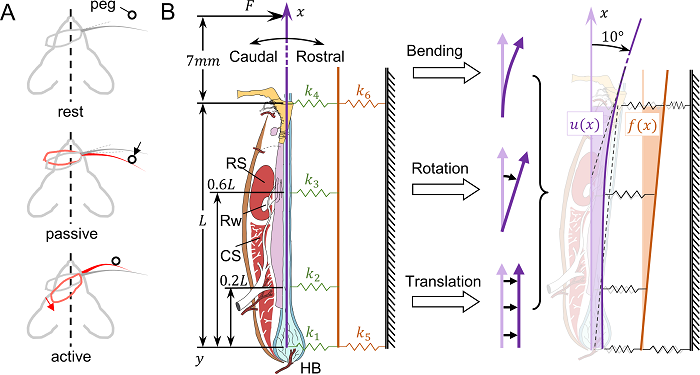 研究配图-4:晶须偏转期间的相对和绝对位移
研究配图-4:晶须偏转期间的相对和绝对位移当动物使用肌肉挪动胡须时,新模型适用于被动触摸和主动出击。模拟表明,在主动调用期间,晶须系统的触觉灵敏度,会通过增加毛囊内的血压、以及增加肌肉和组织结构的刚度而得到增强。
Mitra Hartmann 补充道:“使用受解剖学观察结果约束的模拟,我们能够获得此前无法直接通过实验来测量的生理过程的见解,此外这项工作还凸显了机械学对于理解大脑进化与感受信号处理的重要性”。