来源:机器之心
编辑:魔王
香港中文大学多媒体实验室(MMLab)OpenMMLab 开源一体化视频目标感知平台 MMTracking。
新年伊始,香港中文大学多媒体实验室(MMLab)OpenMMLab 又有新动作,发布了一款一体化视频目标感知平台 MMTracking。该框架基于 PyTorch 写成,支持单目标跟踪、多目标跟踪与视频目标检测,目前已开源。
GitHub 地址:https://github.com/open-mmlab/mmtracking
MMTracking效果展示。
据介绍,MMTracking 具备以下主要特性:
1. 首个开源一体化视频目标感知平台
对视频内的目标进行感知识别一直是学界、业界都非常关心的问题。这个问题在学界常被细分为不同的子问题,比如视频目标检测、多目标跟踪与单目标跟踪。具体来说,
视频目标检测只需对视频内的每一帧进行检测,不要求对不同帧中的同一目标进行关联。
多目标检测在完成视频目标检测的基础上,更加侧重于对视频内的同一目标进行关联。
单目标跟踪更加侧重人机交互,算法需要在给定一个任意类别、任意形状目标的情况下,对其进行持续跟踪。
近几年来,虽然各个任务都涌现了许多优秀的算法,但这些领域仍然缺少开源的代码框架,给代码复现、借鉴、公平对比带来了很大困难。OpenMMLab 将这些任务融合到了同一框架下,希望能够作为开源的一体化视频目标感知平台,推动不同子领域间的融合、互促与发展。
2. OpenMMLab 内部项目间的充分交互
视频目标感知在大部分情况下可以认为是 2D 目标检测的下游任务,十分依赖各种 2D 目标检测算法。在此之前,如何使用或切换不同的 2D 目标检测器其实是一个很烦琐耗时的任务。
MMTracking 充分利用了 OpenMMLab 其他平台的成果与优势,比如它 import 或继承了 MMDetection 中的大部分模块,极大地简化了代码框架。在这种模式下,通过 configs 可以直接使用 MMDetection 中的所有模型。以多目标跟踪举例,每一个多目标跟踪模型多由以下几个模块组成:
import torch.nn as nnfrom mmdet.models import build_detectorclass BaseMultiObjectTracker(nn.Module):def__init__(self,detector=None,reid=None,tracker=None,motion=None,pretrains=None):self.detector = build_detector(detector)...
Configs 示例:
model = dict(type='BaseMultiObjectTracker',detector=dict(type='FasterRCNN', **kwargs),reid=dict(type='BaseReID', **kwargs),motion=dict(type='KalmanFilter', **kwargs),tracker=dict(type='BaseTracker', **kwargs))
现阶段的 ReID 模型也继承了 MMClassification 中的一些模块并将在后期增加其他支持。
受益于 OpenMMLab 的这种模块化设计,MMTracking 可以利用其他图像级平台的已有成果,从而只需要注重视频部分模块的设计与开发。同时,如果用户需要单独训练一个目标检测器,该工具也支持直接使用 MMDetection 的 configs 进行训练,只需要在 config 中添加一句 USE_MMDET=True 即可将模式切换到 MMDetection 下,进行前序模型训练。
3. 高效、强大的基准模型
视频目标感知领域中的不同方法往往各成一派,缺乏公认的训练方法与准则,因此在很多时候很难做到真正的公平对比。
MMTracking v0.5 复现了各个领域的主流算法,包括:
视频目标检测:DFF、FGFA、SELSA
多目标跟踪:SORT、DeepSORT、Tracktor
单目标跟踪:SiameseRPN++
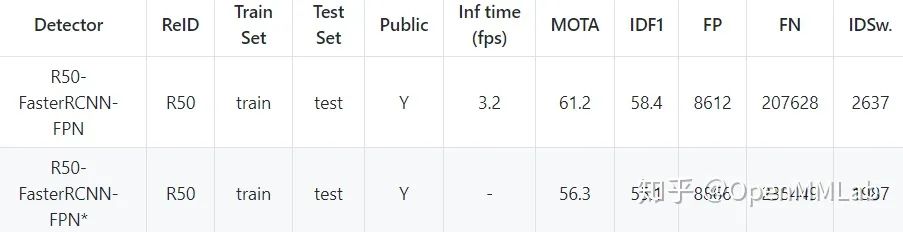
据 OpenMMLab 知乎文章介绍,MMTracking 在保证高效训练与推理的基础上,有些模型甚至超出官方实现,例如:
对视频目标检测算法 SELSA 的实现结果(第一行)相比于官方实现(第二行),在 ImageNet VID 数据集上 mAP@50 超出 1.25 个点。

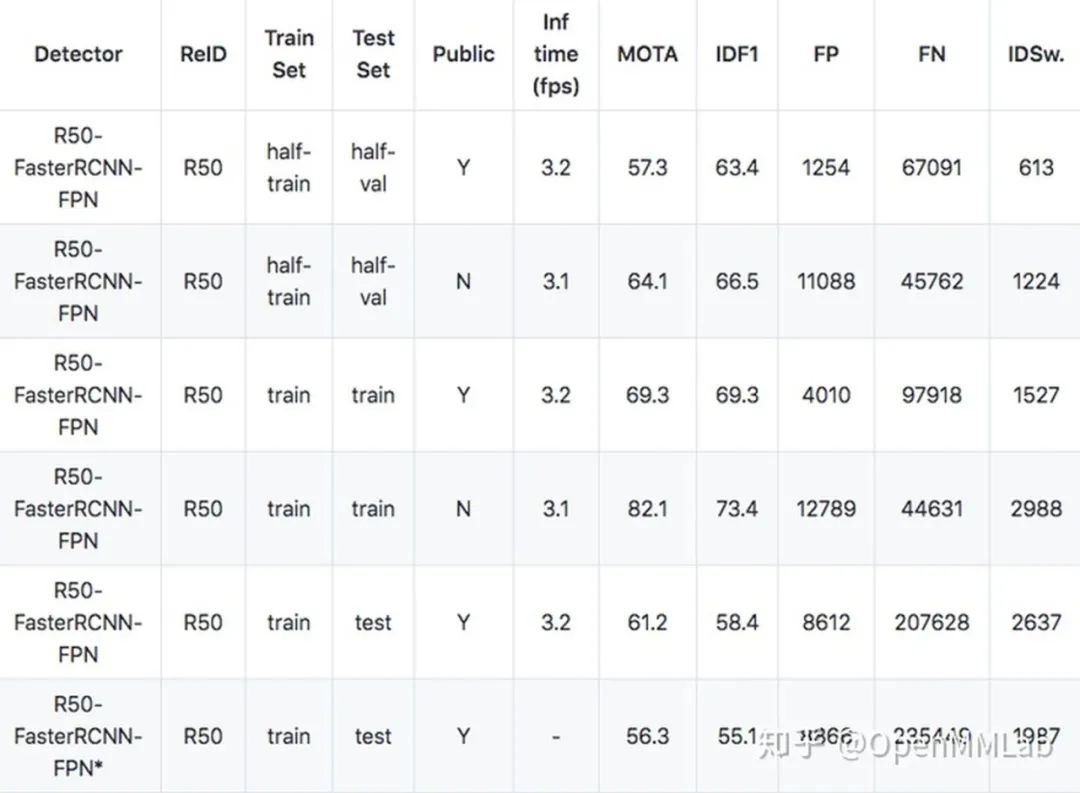
对多目标跟踪算法 Tracktor 的实现结果(第一行)相比于官方实现(第二行),在 MOT17 数据集上 MOTA 超出 4.9 个点,IDF1 超出 3.3 个点。
对单目标跟踪算法 SiameseRPN++ 的实现结果(第一行)相比于官方实现(第二行),在 LaSOT 数据集上的 Norm precision 超出 1.0 个点。

OpenMMLab 知乎文章:https://zhuanlan.zhihu.com/p/341283833