原标题:被“网暴”的国产机器狗,真自研还是新噱头?
智东西4月6日报道,近期,一只国产机器狗的测试视频火出圈——欢脱蹦跶的小腿,急转急停的身姿,行走速度最快达4.15米/秒,据称超过此前全球最快的“3.7米/秒”,打破世界纪录。

名为#中国公司研发机器狗超越世界纪录#的话题登上微博热搜,获得1.4亿阅读。
自2021开年以来,这种像小狗一样的四足机器人就频频刷屏——春晚、短视频平台、科技巨头发布会都能看到它的灵活身姿。但走红的同时,国产四足机器人也不断遭遇此起彼伏“网暴”,被口诛笔伐为“套壳产品”、“伪创新”、“滚出中国”。
数以万计的网友质疑到,这不是用了国际机器人厂商波士顿动力的开源技术?中国的技术和外国差了多少条街?许多评论区公然“开撕”。
我国四足机器狗究竟做得怎么样?网友热议问题的答案不应在热闹中被掩盖,今天我们就来走近产业幕后扒一扒。
01.国产机器狗大火,网友:咋都长得像波士顿动力家的?
开篇中提到的“暴走”机器狗,是蔚蓝科技公司新发布的AlphaDog C200。据公开资料可知,该产品支持人脸及手势识别、文字识别、语音识别、聊天对话等功能,无需遥控器就能自由行走,目前已开始非公开向特定对象预售,平价版定价低至16,900元。
 ▲媒体报道中的AlphaDog C200机器狗
▲媒体报道中的AlphaDog C200机器狗对于这样的性能和价格,微博网友纷纷评价:“平价版的话 那肯定心动”、“祖国真棒”,都获得了高点赞。
从2021年央视春晚起,机器狗的热度就一波攀升过一波。一群名为“牛犇犇”的四足机器人就圈粉无数,和刘德华等明星一起跳踢踏舞,表演后空翻。

刚表演完,就脱下戏服为剧组送起盒饭。有媒体把视频剪在一起配文“同牛不同命,有些牛光线亮丽,有些牛只能送盒饭”,引发大波“打工人”的病毒传播。

网友们大呼:“这是上的厅堂,下得了厨房的牛。”也有网友自嘲:“谁还不是个打工牛”、“打工就打工,还把人新衣服给扒了”,引起上万点赞。
牛犇犇成牛年网红之后,背后公司宇树科技也火了一把。
 ▲装箱装车去北京前的宇树科技四足机器人
▲装箱装车去北京前的宇树科技四足机器人公司CEO王兴兴在知乎上讲述背后打仗般的筹备经历,引起上万网友围观、上千点赞。很多网友感慨,中国科技越来越强了。
国产四足机器人在2021年开年赚足了眼球,而这边,在宇树牛犇犇这把火还没熄,那边,腾讯又点了一把火。
2月初,腾讯推出四足机器人“Max”,秀出机器狗瞬间站立的新功能。
它可以站着抢红包、作揖,能够快速切换成“轮滑模式”,速度最高可达25公里/小时。

这与腾讯去年年底已经发布就引起关注的走梅花桩的Jamoca,都出自Robotics X实验室。
有不少网友看到很兴奋,大呼“这才是巨头应该做的事!”
其实,自2020年底我们就看到在很多企业、警务、公安等宣传片中频繁展出四足机器人,引起热议。视频中演示人员凶狠地踢过去,狗还是不依不饶。网友都看不过去了:“再踢急眼了”。有网友十分有代入感地说:“天网AI:这就是人类对待我们祖先的罪证。”

五花八门的机器狗,告别了几年前僵硬呆板的动作姿态,姿态生动地走进大众生活,圈粉无数。
但与此同时,热度的另一面却是关于技术的争议。
在打破世界记录的AlphaDog C200视频评论下,不乏网友评论“做点别人没做过的才是超越”、“买外国的机子,套个外套”,质疑国产玩家没有本质创新。

还比如,在腾讯发布“腾讯首个软硬件全自研”的多模态四足机器人之后,“全自研”这个词却引起了广大网友的争议。
有网友讽刺到:“像极了孔乙己为自己辩解的样子”、“腾讯果然擅长借鉴和改良”,有人直接称“波士顿狗之波士顿狗仔。”
还有网友直接评论:“没有借助波士顿动力吗?”
大家常提的波士顿动力成立于1992年,是一家美国机器人公司。2015年,波士顿动力发布了一款Spot四足机器人一炮而红。Spot每年都会更新一些功能,最近一次就在今年2月,波士顿动力的新版Spot表演了三只机器狗一起跳绳,在雪地上徒“手”捡垃圾,化身勤劳的园丁种花花草草,走进SpaceX星舰事故现场探查等。标价74500美元(约为48万人民币)。

波士顿动力的机器狗再次引起国内关注,很多网友望洋兴叹,认为还是波士顿机器技能更丰富强大。在这些视频的评论中,排在第一条的是“领先我们五十年不止”、“认清自己 我们任重道远”。
再看看自家“土狗”,有网友对腾讯“MAX”讲起了段子:“机器狗的皮肤该提上日程了”暗讽王者荣耀。也有网友犀利地直说:“游戏抄,我就忍了,怎么这个也抄啊”。
腾讯发布MAX的消息也被新华社报道,报道下的首赞评论是一条忧患意识十足的呼吁:“波士顿代码是个陷阱呀!为的就是减少自主研发,最终像微软安卓那样控制系统源头。”
腾讯尚未对此类质疑进行回复。
不过,开头提到的宇树科技也遭到了类似的网友攻击,比如有知乎网友问:“为什么它和波士顿动力的机器人这么像呢?”
宇树科技CEO王兴兴对此进行了回复,他在评论区答到:“因为大家见的太少了。”
不得不说,同是机器狗,“土狗”与“洋狗”待遇悬殊。而其中最大的质疑点在于,为什么国产机器狗与波士顿机器狗长这么像呢?国产机器狗真的用了波士顿动力的开源技术吗?
02.追溯机器狗开源江湖国产机器狗什么来路?
针对国产四足机器人有没有用波士顿动力开源代码的问题,宇树科技的一位运营经理早在2020年就进行了答复。
他说:“波士顿动力到目前为止从来没有开源过。”除此之外,这位运营经理还补充到:“而且我们的技术是全球第一家采用电驱,波士顿(机器狗)采用液压驱动。”
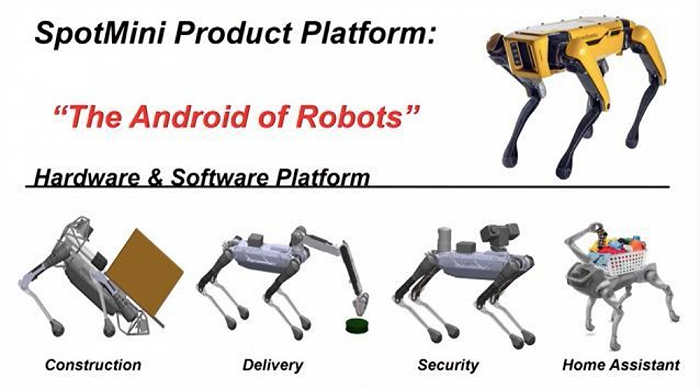
原来,波士顿动力创始人Marc Raibert曾暗示过开源Spot技术,但至今并没有正式实施行动。2018年7月,波士顿动力公司创始人Marc Raibert在德国汉诺威召开的一场技术会议上以“SpotMini产品平台:机器人的Android”进行演讲,暗示机器人将成为像安卓一样无处不在的机器人开源平台。但三年过去了,波士顿几易其主从谷歌到软银,再到今年以9.21亿美元“贱卖”给现代汽车,依然没有开源技术。
谈到国产化情况,宇树科技的运营经理说:“当然芯片这种我们肯定是需要采购的,但大多用的是国内的芯片。像电机、外观设计、结构组装全部都是我们自研的。包括电机里面最主要的减速器、驱动器等核心的模块都是我们自研的。”
对于技术自研问题,腾讯MAX团队还没有进行答复。只有一位自称参与过腾讯Max的业内人士称,这款机器人可能用到了麻省理工大学(MIT)的相关开源技术。他说,迷你猎豹的控制和本体部分做的很优秀,腾讯的Max在本体部分做了一些改进,如加入轮式结构等微创新。
虽然这一消息没有官方回应,但我们可以先了解一下迷你猎豹(Mini Cheetah)。这是MIT仿生机器人实验室的四足机器人,配置齿轮、电池、电动马达,与动物猎豹的重量也差不多。据悉猎豹最高时速能达到30英里,但目前不依靠外部传感器,没有感知能力。
 ▲麻省理工学院研发的迷你猎豹机器人
▲麻省理工学院研发的迷你猎豹机器人2018年,MIT Biomimetic Robotics Lab成员 Benjamin Katz 在他的硕士论文中,开源了 MIT Cheetah Mini 电机驱动器,连接12个电机与机载电脑的中心板(SPIne)的代码和硬件。
一个月后,2018年10月2018 IEEE / RSJ国际智能机器人与系统国际会议(IROS)上,Katz又开源了在 Cheetah Mini 上运行的所有代码。

也就是说,世界上最先进的四足机器人之一——迷你“猎豹”的所有软件、固件、除机器人本体外的硬件已经全部公开。
而关于为什么国产机器狗为什么和波士顿机器狗长这么像的问题,一位工程结构力学领域的研究人员认为,机器狗长什么样是经过受力分析研究做出的最优配置,业界整体推进演变成现在的外形。即便是内部每一个模块技术全都不一样,外部长相可能还是类似的。
03.40年国产多足机器人研发史智能化将做的更好
其实,多足机器人的技术研究涉及机械本体研究、步态研究、控制技术研究、驱动能源研究等多方面,而远非许多网友说到的“开源算法”。
比如,腾讯在3月19日公开一项名为“机械腿和机器人”的专利,就是一项通过第一机架、大腿驱动电机、小腿驱动电机、大腿连杆机构、小腿连杆机构和脚掌多环节,提升仿真逼真度的技术。蔚蓝智能科技公司也公布了关于电机、机器腿、快充等方面的10调专利技术。
我国学术界在多足步行机器人领域已有多年积累。看看1991年我国四足步行机器人的研发成果,也能猜到,为什么宇树科技创始人兼CEO王兴兴说“大家见的太少了”。
时间追溯到1991年,当时,我国上海交通大学马培荪等研制出JTUWM系列四足步行机器人。这是模仿马等四足哺乳动物的腿外形制成,每条腿有3个自由度,由直流伺服电机分别驱动。
JTUWM -III以对角步态行走,脚底装有PVDF测力传感器,利用人工神经网络和模糊算法相结合,采用力和位置混合控制,实现了四足步行机器人JTUWM-III的慢速动态行走,极限步速为1.7 km/h。
 ▲文献中我国早年研究中的多足步行机器人
▲文献中我国早年研究中的多足步行机器人虽然当时的实体看起来还比较粗糙,但表明我国有长达几十年的四足机器人研发积累。这类早期研究我国还有很多:
1989年北京航空航天大学的四足步行机;
1990年中国科学院沈阳自动化研究所的全方位六组步行机;
1991年上海交通大学 JTUWM系列四足步行机器人;
2000年上海交通大学 微型六足机器人;
2002年上海交通大学 微型六足仿生机器人;
2003年哈尔滨工程大学 两栖仿生机器蟹……
当然,有人会说,美国、日本的多足机器人的研究可能更早、更先进,但至少证明的一点是——中外多足机器人的发展都是长达多年的积累和比拼。当下,国内多足机器人企业正从中外几十年更新迭代的多足机器人研发成果基础上做产业化尝试,从囊括的人才中就能可见一斑。
比如:腾讯Robotics X实验室及腾讯AI Lab负责人张正友就是腾讯首位17级研究员/杰出科学家,17级是腾讯历史上最高的专业职级。在国际顶尖会议和杂志上,张正友发表论文250余篇,论文引用次数51000多次,有超200项专利。
当我们把眼光看向未来,四足机器人向智能化发展,更是中国科技企业的机遇。
其实,当下无论是“土狗”还是“洋狗”都仍然比较“傻瓜”。比如你看见一只机器狗可以在雪地里捡起一块垃圾,这仍然是程序设置好的,你并没有看见它自己判断森林需要清扫了,于是主动把一整片森林的垃圾捡完。
要让机器狗具备更强大的认知智能,日后仍需要人工智能技术的支持——我国已经走在国际前列。根据斯坦福大学的《2021年度AI指数报告》显示,2020年中国在人工智能期刊被引频次首次超过美国。在刊登数量上,早在2004年,中国在人工智能期刊的总发表数量上短暂超过美国,然后在2017年重新占据领先地位。
将人工智能技术赋能多足行走机器人,中国企业的超车可能性还是很大的。
04.结语:国产机器人崛起,智能多足机器人创业
国产四组机器人的走红中伴随着争议。通过调查分析,我们发现一方面,目前我国多足机器人研究与世界先进技术仍有距离,但另一方面,在多足机器人的技术研究涉及机械本体研究、步态研究、控制技术研究、驱动能源研究等多方面,我国已经进行了长达几十年的艰苦研发,取得进展。
随着四足机器人朝着认知智能方向发展,国内的人工智能技术已处于全球领先水平,国产多足机器人赶超国外也是非常有可能的事。当然,在一些底层芯片制造、控制系统等层面的技术的自研依然需要业界重视,从而支持国产多足机器人更加可持续发展。